
摘要:针对交流异步电机的特性,设计了一套基于DSP的交流异步电机高精度调速系统。系统应用矢量控制技术作为系统的总体控制方案,以TI公司电机控制专用的高速数字信号处理器(DSP)TMS320F2812为系统的核心处理器,三菱电机公司的PS21246智能功率模块(IPM)为逆变器件,在此基础上运用空间电压矢量脉宽调制技术和模糊PI控制算法,构建了一个基于TMS320F2812 DSP的交流异步电机高精度控制平台。
关键词:DSP;IPM;矢量控制;SVPWM;模糊PI
近20年来,随着新型电力电子器件的出现,控制器也实现了从8位单片机到32位DSP的转变,特别是新型控制方法的出现,如:矢量控制、直接转矩控制以及模糊控制等,使得高精度交流异步电机调速系统实现成为可能。矢量控制具有转矩平滑,调速范围宽的特点。空间矢量脉宽调制技术(space vector PWM,SVPWM)物理概念清晰,电机脉动转矩小,直流电压利用率高,且易于实现。本文设计并实现了一套基于DSP的高精度交流调速系统,系统采用高速DSP芯片TMS320F2812作为核心,基于矢量控制与SVPWM相结合的控制方式,利用TMS320F2812芯片的事件管理器模块(event manager,EV)产生对称SVPWM脉冲,逆变器则采用智能功率模块(intelligent power module,IPM),保证了系统可靠性。在此基础上综合模糊PI控制算法,最终设计并构建了基于DSP的高精度交流调速系统。
1 系统的硬件总体设计
系统为基于高性能处理器的全数字交流调速系统,利用处理器实现对电机的速度环和电流环控制,与传统的模拟调速系统相比,有着结构简单、功能灵活多样、抗干扰能力强等优点。图1为交流调速系统的结构框图。
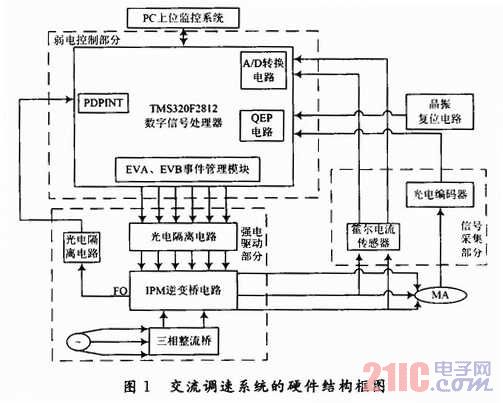
系统由弱电控制、强电驱动以及信号采集3部分组成。弱电控制部分是系统的控制核心,其完成对电机的控制、信号量的设定。强电驱动部分是由逆变电路、三相整流桥和三相交流电源组成,其将不可控的三相交流电转化为频率可控的三相交流电来驱动电机。信号采集部分则由电流、测速传感器组成,负责对电机进行电流和转速的检测,为系统提供反馈信号。以上3部分有机的组合在一起就构成了一个高精度交流电机调速系统。
2 主要硬件芯片的选型及相关电路设计
2.1 DSP芯片的选型
主处理器选择了TI(美国德州仪器)公司的TMS320F2812芯片,F2812是TI公司的一款用于控制的高性能、多功能、高性价比的32位定点DSP芯片,最高可在150 MHz主频下工作。F2812片内集成众多资源:存储资源FLASH、RAM;标准通信接口,如串行通信接口(SCI)、串行外设接口(SPI)、增强型eCAN总线接口,方便与外设之间进行通信。在F2812内部还集成了一个12位的ADC转换模块,最高采样速率达12.5 MS/s;F2 812片上还包括事件管理器(EV)、定时器、看门狗以及大量的用户可开发利用的GPIO口等资源。该芯片具有很高的性价比,广泛应用于工业控制,特别是应用于处理速度、处理精度方面要求比较高的领域,十分适合于本文的高精度电机控制系统。
2.2 逆变电路
逆变电路将整流后的直流电变成可控的交流电,考虑系统的安全性和稳定性要求,此部分采用模块化的设计思想,即选择智能功率模块IPM作为功率器件。
IPM是一种先进的功率开关器件,具有高电流密度、低饱和电压、耐高压、高输入阻抗、高开关频率和低驱动功率等优点。IPM内部集成了逻辑、控制、检测和保护电路,不仅减小了系统的体积以及开发时间,也增强了系统的可靠性。
系统采用了日本三菱电机的PS-21246系列的IPM智能功率模块。当IPM发生故障时,FO引脚输出低电平,产生PDPINT功率保护中断,实现保护。
2.3 高速隔离电路
为实现低压数字电路和高压功率电路之间的电气隔离,通常采用光耦隔离,另外,由于SVPWM算法输出信号频率较高,需要反应速度较快的光耦,普通的P521光耦无法满足速度要求,故设计中采用的是一款专用的IPM驱动芯片HCPL-4504。
HCPL-4504是美国安捷伦公司专为IPM等功率器件设计的高速光电隔离接口芯片,瞬间共模比为15 kV/μs,内部集成高灵敏度光传感器,可以准确、快速反应信号变化状况,极短的寄生延时合适于IPM,是功率器件接口的完美解决方案。
2.4 电平转换驱动电路
由于HCPL-4504需要的的驱动电流为16 mA,而DSP为3.3 V TTL电平标准,其输出的电流只有nA数量级,因而无法直接驱动。因此,系统需要增设电平转换驱动电路,如图2所示。
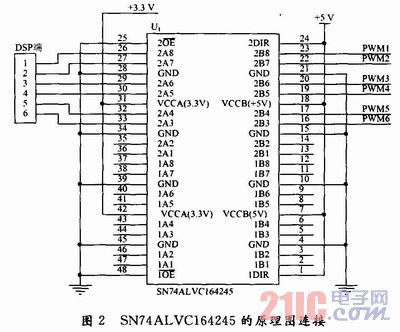
选用的芯片SN74ALVC164245是TI公司推出的一款3态输出电平转换芯片,提供2×8道的3.3 V转5 V(反之亦可)的电平转换接口,最大可输出24 mA电流,其中A端为5 V电平,B端为3.3 V电平。
2.5 霍尔电流传感器
霍尔电流传感器是利用霍尔效应来测量电流的,不仅能测直流电流,也能测交流电流,测量精度和量程比电流互感器高,受温度影响很小,且不会产生电流过载。霍尔电流传感器的功耗极低,这是其他互感器无法达到的。系统采用QBC-SY/SYW系列闭环霍尔电流传感器,该系列电流传感器的初、次级之间是绝缘的,具有超强抗干扰能力,用于测量直流、交流和脉动电流。交流互感器连接图如图3所示。

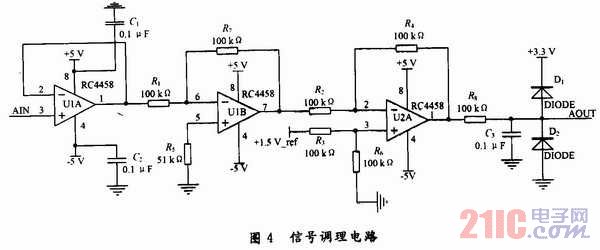
该款传感器集成了调理电路,在最大可测量输入电流3 A条件下,输出电压4 V。由于驱动电机的额定输入电流为1.12 A,所以其最大输出电压可达,但这并不符合TMS320F2812的输入要求,故还需要另加上一组信号调理电路,将输出电压从±1.5 V调理到0~3 V,才能符合DSP内部3.3 V A/D参考电压的要求。
信号调理电路需使用RC 4558和TLV431两种芯片,其中RC 4558为双路高性能运放;TLV431为低压可调精密分流稳压器,用作输出一个1.5 V的恒定电压供给信号调理电路使用。信号调理电路工作原理为:当电压信号输入时,先利用放大器作一级跟随处理,然后进行反相,最后进行加法运算。具体电路图如图4所示。
2.6 旋转编码器
为了实现矢量控制,就必须对电动机的实际转速进行测量,因为TMS32F2812本身的事件管理器中有正交编码脉冲电路,用于连接光电编码脉冲以获得旋转机械的位置和速率,方案中转速测量就采用旋转编码器。
系统综合考虑后选择了ELTRA公司的EL40A1024Z5增量式编码器作为系统得测速单元。其分辨率达到了1 024脉冲/转,带有零脉冲,输出电平为NPN集电极开路输出,可直接连接DSP,测量转速最高可达6 000转。
TMS320F2812有两个事件管理器(EVA、EVB),每个事件管理器(EV)模块都有一个正交编码器脉冲(QEP)电路,它们可以直接与编码器相连,用来检测转速。如果电路被使能,那么可以对从CAP1/QEP1和CAP2/QEP2(EVA)或CAP4/QEP3和CAP5/QEP4(EVB)引脚上输入的正交编码脉冲进行解码和计数。当QEP电路被使能,CAP1/CAP2和CAP4/CAP5引脚上的捕获功能将被禁止。
3 系统软件设计
系统软件采用模块化设计,可以分为2个部分;主程序和中断服务子程序。
主程序中对硬件和变量进行初始化,对各个控制寄存器置初值,对运算过程中使用的各种变量分配地址并设置相应的初值。初始化模块仅在DSP上电复位后被执行一次,然后进入循环等待时期,如图5所示。
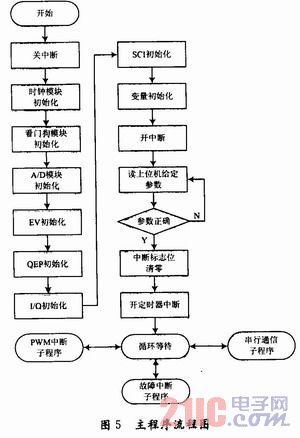
中断服务子程序是系统的核心部分,包括PWM中断服务子程序,故障保护中断服务子程序,串行中断服务子程序。其中PWM中断服务子程序负责对电流A/D转换、速度计算、矢量变换、SVPWM输出等。故障保护中断服务子程序在系统出现故障时,将会立即禁止PWM输出。串行中断服务子程序则负责DSP与PC上位机之间的通信,如图6所示。

初始化之后,系统的运行交由中断服务子程序控制。PWM中断服务子程序负责两相定子电流的采样,转速的计算,矢量变换以及SVPWM调制,是系统实现矢量控制的核心部分。系统采用模块化编程,把PWM中断服务子程序分为电流采样模块,电机转速计算模块,矢量控制坐标变换模块,模糊PI调节模块,SVPWM调制模块。
4 结语
针对交流调速的特点,设计了一套基于DSP的交流异步电机高精度调速系统。该系统应用矢量控制技术作为系统的总体控制方案,以TI公司电机控制专用的高速DSP TMS320F2812为系统的核心处理器,三菱电机公司的PS21246智能功率模块(IPM)为逆变器件,在此基础上运用空间电压矢量脉宽调制(space vector pulse width modulation,SVPWM)技术和PI控制算法,构建了一个基于TMS320F2812 DSP的交流异步电机高精度控制平台。实验表明,系统基本满足高精度调速要求,十分适合于伺服控制系统。