作 者:浙江工业大学机电学院 王贵明
汽车转向系功能要求与其相应机构的分析
汽车转向系统性能即很大程度地决定了对汽车操纵的轻便舒适性和安全行驶的稳定平顺性,也是减少交通事故和提高道路通行能力的重要因素。随着现代汽车及其相关技术的发展,对汽车转向系统的功能提出了越来越高的要求,现结合其相应机构的运行原理分析如下。
对转向盘的操纵要求即轻便灵活又有稳定的操作感受
由于车轮转向时轮胎与地面的摩擦阻尼随车速降低而增大。即在汽车低速转向时,对无助力传统机械转向系的方向盘操纵会相当费力,为此目前基本已均采用了动力转向系。并对转向助力的控制要求随车速增加而减小。而在车速很高时由于方向盘的转动力会很轻,为避免对转向盘微小的干扰力而引起汽车偏离方向,削减因路面不平撞击转向轮的冲击传到转向盘而造成“打手”现象,并在转向结束时转向盘能有自动回正功能使汽车保持稳定直线行驶,使驾驶员通过转向盘对转向过程中车轮与地面之间的运动状况能始终保持适当的“路感”,在汽车高速行驶时又希望能对转向系统有一种“反向”助力,即适当增加转向系的阻尼。
对转向操控有较高的灵敏性并能简化其结构以减小能耗
对转向系操纵时要求车轮快速响应使车身能及时转向。这除了尽可能减小转向系各传动机构的空行程间隙外,还要求用于转向助力的动力控制装置响应快。目前所用的动力转向系统主要有液压、气压和电动三种,前两种存在能耗大、响应慢等缺点。虽然液压助力转向系统是目前传统汽车较为普遍采用的装置。但随电动汽车的发展,以及按各相关控制的特点[1],需采用电子控制电动助力转向系统(eps,electric power steering)较为合适。由于省去了液压动力转向系所须的常运转油泵、储油罐、管路等,电机只在需转向期间才接通电源转动,即降低了能耗又使结构紧凑减轻车载自重,并不必补充油液和担心漏油等,使工作更可靠。这对车载能源不富裕的纯电动汽车尤为适用。而现有电动助力转向系统eps采用的是旋转电动机,需经电磁离合器、齿轮减速传动等机械机构,还存在机构庞杂,占用空间大,响应速度较慢等缺点。根据转向机构最终带动转向节臂的横拉杆均为左右直线运动等特点,为此本文提出用直线步进电机直接带动左右横拉杆,使控制更直接,动态响应更快。
要求转向车轮的运动规律正确稳定
即要求内、外侧转向轮的偏转角以及驱动轮的差速比正确稳定,两者的比值与转向盘的转角始终保持一定的关系,以确保在转向时各个车轮只有滚动而无滑动现象。通过对汽车转向时其内、外侧转向轮和驱动轮的运动过程分析,为保证各车轮只滚动无滑动,要求四车轮均应绕同一圆心转动。设l为汽车轴距,b为汽车轮距,α、β分别为外、内侧转向轮的偏转角,则要求车轮作纯滚动条件为:ctgα=ctgβ+b/l。说明了外转向轮偏转角α须小于内转向轮偏转角β,并同时要求内、外侧驱动轮还需满足相应的差速条件[2]。为满足内、外侧转向轮的偏转角要求,需使其转向机构的左、右横拉杆与转向节臂成相应角度的梯形即非平行四边形关系,这也是各类转向系普遍采用的基本方法。为满足驱动轮差速要求有采用机械差速和电子差速两种。机械差速是传统汽车普遍采用的方法,其机构庞大而复杂。而电子差速系统eds是采用电子控制来实现,有诸多优点,随电动汽车的发展,特别是轮毂电机的应用,它将是汽车驱动轮差速控制的发展方向。
有相应的安全可靠性
当汽车发生碰撞时,转向盘等装置应能减轻或避免对驾驶员的伤害。而当动力转向系统失效或发生故障时,应能保证通过人力转向仍能进行转向操纵。
尽可能减小转弯半径和提高高速转向时的稳定性
为减小低速转向时的转弯半径,便于低速选位停车或窄道转向行驶;以及改善高速转向或在侧向风作用时的行驶稳定性,还需采用高性能的四轮转向[2]来满足。
通过上述分析,根据转向机构最终带动转向节臂的横拉杆均为左右直线运动等特点,为提高转向系的快速响应性和满足在不同车速下有相应的助力等功能要求,在此特提出用直线步进电机直接带动左右横拉杆的两种汽车转向系统控制机构。为说明其转向系的结构原理,还得对直线控制电机先作必要说明。
直线控制电机简介
所谓直线电动机其实就是把旋转电动机沿径向剖开拉直演变而成,它是由电能直接转换成直线机械运动的一种推力装置。就控制理论来说直线电动机用于直线位移机构,将使控制变得更直接,动态响应更快,并且由于省去许多机械传动件,使其机械结构更简捷,消除了机械间隙,有利于提高精度、传动刚度、能量转换效率以及降低噪声等。为提高数控伺服系统的控制精度和快速响应性,作者早在1986年就提出了用恒温直线电机驱动的数控伺服装置的发明专利[3]。而相隔十几年后,用直线电机驱动的各类超高速精密数控机床[4]就开始不断涌现,如在1996年芝加哥国际制造技术博览会(imts-96’)等先后展出,世界行内专家把该类机床称为“下一代新机床”。
从直线电机的工作原理来讲,它与旋转电机一样,同样也有直流、交流、步进、永磁等类型。而从结构来讲,它又有动圈式、动铁式、平板型、圆筒型等多种形式,即直线电机可演变生化出比旋转电机更多的种类。大到磁悬浮列车、直线打桩机……小到遥控电动窗帘、绘图仪位移机构等各种技术领域都可有其应用实例。并且电机的结构形式可按其应用机构的需要来选择更适应的方案。随着现代电机直接转矩控制技术、机电一体化及相关技术的不断发展完善,将使直线电机的应用领域越来越广泛。多种技术相互交叉、渗透、融为一体地应用于某一领域,是当今技术发展的重要趋势之一。

图1 三相直线步进电机的结构示意图
如图1所示为三相直线步进电机的结构示意图。直线电机的动件、定件相当于旋转电机的转子、定子。动、定件上均开有如图所示的齿槽,并用硅钢片冲制叠压而成。动件、定件的齿距须满足一定的关系式,设电机相数为m,动件齿距为b,则定件的齿距p=(k+1/m)b,k为任意正整数。为电机绕组引线方便,通常做成动铁式,即带绕组线圈的为定件,它固定在电机外壳上,而动件可采用直线滚动导轨来上下固定,使其能左右移动,也可直接与被驱动进行直线位移的机械部件相连。电机的外形根据需要可做成长矩形或圆筒形等多种形式。步进电机是按变磁阻原理运行,即遵循“磁阻最小原理”——磁通总是要沿磁阻最小的路径闭合。如在图中所示动件相对定件的位置时,给a相绕组通电励磁,则a相磁极所产生的磁场力就会力求使磁路磁阻减少,即对动件产生向右移的磁拉力,使得动件的凸极齿尽可能多地与a相磁极的凸齿对齐,于是动件在其磁拉力的作用下向右移动了1/3动件齿距b(即图示c相与动件齿对齐的位置)。如果依次轮流对a→b→c三相绕组通电,则动件向右位移;而通电顺序为b→a→c时,动件就向左位移。按制造工艺及精度使动件的齿距做得越小,则每一脉冲的位移量(脉冲当量)就越小。以上描述的是三相单三拍通电方式,实际使用时一般采用三相六拍或三相双三拍通电方式,三相六拍通电顺序为:a→ab→b→bc→c→ca→a;三相双三拍通电顺序为:ab→bc→ca→ab。三相六拍的脉冲当量比三相三拍小一半。
用直线步进电机控制的汽车转向系统结构原理
用直线步进电机控制的转向系统是在前述所提到的电子控制电动助力转向系统eps[1]基础上进一步改进而成,即用直线步进电机来替代eps用旋转电机对转向器中齿条的助力,省去了电磁离合器、减速机构及其传动件,使其结构更紧凑、控制更直接、响应更快。也为更方便地实施高性能的四轮转向(4ws)机构,在此提出两种结构:由直线步进电机控制转向助力的系统可用于传统二轮转向(2ws)系统或四轮转向(4ws)的前轮转向机构;由直线步进电机控制转向力的系统主要用于四轮转向的后轮转向机构。现分别说明如下。
用直线步进电机控制转向助力的汽车转向系统
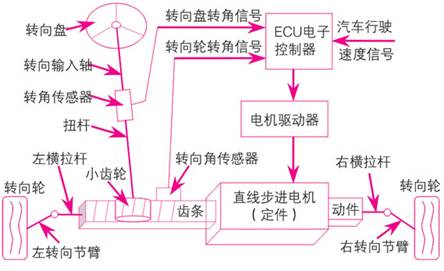
图2 用直线步进电机控制转向助力的汽车转向系统结构原理
如图2所示,其直线步进电机的动件直接与转向器齿条相连,整个直线步进电机套装在转向器齿条机构上,几乎不占用空间。它也是在原先结构最简单的无助力机械转向系中增加一台直线步进电机,由直线步进电机的直线推力来直接助力驾驶员对转向器的操纵力矩,由于对转向器的助力并不很大,齿条的直线位移量也不长,用一台小型直线步进电机足以驱动。其控制原理与eps基本类同,只不过对电机的驱动需改用前述步进电机脉冲分配方式。具体实施可参照有关eps[1]中的电子控制器ecu与其控制逻辑等进行,并借用eps中相关传感器。即根据转向盘转角信号控制直线步进电动机位移量,利用转向轮转角信号来实现闭环控制,精确控制其位移量,根据车速进行相应的助力。在低速时给予较大助力,随车速提高而减小助力,车速高到一定范围时停止助力,而在汽车高速行驶时又希望能对转向系统有一种“反向”助力,即适当增加转向系的阻尼。这一点对于现有的转向系较难做到,而采用直线步进电机助力就很容易实现,根据直线步进电机工作原理可知,只要保持其电机的通电状态即可使该直线位移装置具有一定自锁力,控制其通电电流大小即可改变定、动件之间的磁拉力大小。从而可按车速信号根据要求来控制其转向助力的大小,随着车速的提高即减小绕组通电电流,其转向助力也随之减小;当车速高于相应速度(一般为30km/h)时就取消给转向系助力,即停止给直线步进电机供电;而当车速高到一定程度时,希望能给转向系逐渐增加其阻尼,可使直线步进电机绕组保持通电状态而产生自锁力,控制其电流大小即能改变对转向系的阻尼大小。达到对转向盘的操纵即轻便灵敏又稳定可靠。
用直线步进电机控制转向力的汽车转向系统
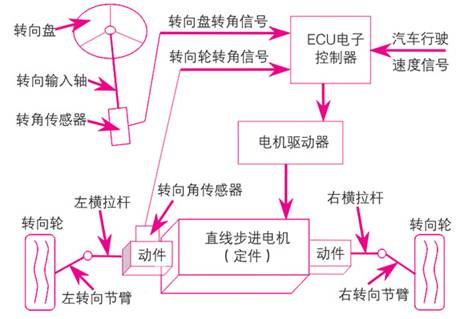
图3 用直线步进电机控制转向力的汽车转向系统结构原理
如图3所示,它进一步简化了转向系的结构,去掉转向盘至横拉杆中间的所有传动链,包括齿轮输入轴扭杆及齿轮齿条付。转向盘内安装有转向盘转角传感器,并适当增加其转动阻尼,独立安置于驾驶室内。而直线步进电机的动件两端直接与左右横拉杆相连,电子控制器根据转向盘的转向角度信号及车速信号,来控制直线步进电机动件进行左右位移,经横拉杆、转向节臂传动,进而控制车轮转向。在确保系统可靠性的前提下,该方案的优点是结构更简单、所占体积更小、成本低、控制更直接、响应更快。但一旦系统发生故障,汽车就无法转向。而用在四轮转向4ws系统的后轮转向机构中却是优选的方案。它的应用有望使汽车四轮转向4ws系统的性价比进一步得以提高。
结语
文中阐述了为提高汽车转向系统的快速响应性和满足在不同车速下有相应的助力等功能要求,在对汽车转向系统各功能要求与其相应机构运行原理的分析基础上,根据转向机构最终带动转向节臂的横拉杆均为左右直线运动等特点,提出了用直线步进电机直接带动左右横拉杆的两种汽车转向系统控制机构。此设计方案可使控制更直接,动态响应更快,又省去了大部分机械或液压部件,使结构更简捷,且利用直线步进电机的控制特点,即可方便地充分满足转向力随车速变化的各控制要求,又提高了转向精度。该设计方案的实施还有助于提高高性能汽车四轮转向系统的性价比。
作者简介
王贵明(1950-) 男 高级工程师,研究方向:数控伺服技术,电动汽车、智能交通等相关技术及机电一体化。
参考文献
[1] 王贵明,王金懿.电动汽车及其性能优化[m].北京:机械工业出版社,2010.
[2] 王贵明,王金懿.电动汽车用四轮毂电机驱动实现四轮转向的电子差速转向控制系统[p].中国:200910152933.1,2010.6.2.
[3] 王贵明.用恒温直线电机驱动的位移控制装置[p].中国:cn86107217,1987.6.10.
[4] 王贵明.直线电机进给系统特点及改进方案[j].制造技术与机床.1999.6.
