
目前,我国在役长距离油气输送管道总长两万公里左右,腐蚀导致的油气泄漏事故时有发生,造成了经济损失、能源浪费。因此,对油气管道进行检测在国民经济中占有极为重要的地位。漏磁检测法是国家863高科技项目“管道检测爬行器”采用的主要技术。其中的关键部件——InSb霍尔传感器由于半导体材料的固有特性和制造工艺的缺陷,对温度敏感,需要采用一定的温度补偿措施[1]。该文针对已研制成功的检测设备,采用多传感器数据融合方式消除温度误差。构建了多传感器融合模型,选用径向基函数(Radial Basis Function,RBF)网络对磁敏传感器和温度传感器的输出进行融合,并通过实验验证了该方法的有效性。检测系统的准确度和稳定性有了明显的提高。
1漏磁检测装置及传感器温度特性
1.1漏磁检测原理及装置
漏磁检测法是近年来广泛应用于输油输气管道检测的有效方法,原理如图1所示。如果被测管壁没有缺陷,磁力线闭合;如果有缺陷,磁力线将穿出管壁而产生漏磁场[2]。磁敏传感器将漏磁场的大小转化为电压数据输出,输出波形的幅度同缺陷的深度、波形的峰峰水平间距同缺陷宽度均是近似的线 性关系。因此,由漏磁信号波形可以反演出缺陷的形状[3]。

已研制的管道检测装置由驱动机器人、系统控制器、供电部件、漏磁检测部件、数据预处理部件和定位装置6部分组成。检测时,系统控制器控制驱动机器人带动各个部件在管道中爬行,漏磁检测传感器组获取管道状态信息并将检测数据送预处理部件放大、去噪、压缩并存储,以备离线分析反演。定位装置用于确定检测系统当前位置。
1.2InSb温度特性
漏磁检测传感器组选用了InSb霍尔元件作为敏感元件。霍尔元件与其他常用的磁敏传感器相比体积小、功耗小、耐震动、不怕油污、水汽等的污染或腐蚀,灵敏度高。但是该检测装置工作于温度、压力较高,且经常变化的环境下,霍尔传感器的输出电压误差较大。图2是不同材料构成的霍尔传感器输出电压与温度变化的关系曲线[1]。InSb非线性严重。

多传感器融合实现误差补偿
多传感器信息融合是20世纪70年代兴起的一个新学科,已广泛应用于目标识别、状态估计、威胁估计等领域。该技术将来自多个传感器的数据进行多级别、多方面、多层次的处理,从而产生新的有意义的信息,这种信息是任何单一传感器无法获得的[4]。
2.1补偿模型
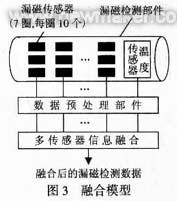
该文尝试将多传感器信息融合应用于误差补偿中。在检测装置的漏磁传感器部件中加入一个温度传感器,实时记录工作环境的温度。国内输油输气管道管径普遍较小,设备已排列7圈,共70个漏磁传感器,空间紧张。而且,部件密封,内部环境温度变化缓慢,因此只加入一个温度传感器。将轴向分布的10排(每排7个)漏磁传感器分别和温度传感器的输出进行融合,得到管道各个部分缺陷的特征参数和反演图形,其模型见图3所示。信息融合策略采用RBF神经网络,其融合来自8个传感器的数据。
2.2RBF神经网络原理
RBF网络是一种典型的局部逼近神经网络,它不像全局逼近神经网络那样,对每个输入输出数据对、每一个权值均需要调整,而是调整对输出有影响的少量几个权值,从而使局部逼近网络在逼近能力和学习速度方面有明显的优势[5]。
该RBF网络结构为8-20-1形式。输入层8个节点只是传递输入信号到隐层,隐层20个单元通过径向基函数实现变换后输出到输出层。输出层节点只是简单的线性函数。最常用的径向基函数是高斯核函数(Gaussian kernel function),如式(1)所示。
![]()
其中,uj是j个隐层节点的输出,X=(x1,x2,…,xn)T是输入样本,Tj是高斯函数的中心值,σj是标准化常数,即径向基宽度,M是隐层节点数。节点的输出范围在0和1之间,且输入样本越靠近节点的中心,输出值越大。
网络的输出yi为隐层节点输出uj的线性组合,如式(2)所示。
2.3训练方法
由式(1)可知,该网络要学习的参数有3类:RBF的中心、宽度和连接权重。可以分别训练,也可同时进行。在隐节点数确定的情况下,采用遗传算法同时训练中心Tj、宽度σj以及隐层与输出层的连接权重Wij。
遗传算法是模拟生物进化过程的计算模型。它对包含可能解的群体反复使用选择、交叉和变异操作,不断生成新的群体,使种群不断进化。当输入节点较多时,该算法比传统BP算法的全局最优性更佳,速度更快[6]。算法的适应度函数见式(3)。
![]()
其中,N为样本数量,M为隐层节点数,b为待定系数(一般取较大的值,以保证适应度大于零),d为期望的输出,y为网络的实际输出。 ![]()
择概率S(j)见式(4)。其中,fj表示个体j的适应度。S为群体规模。
文中采用单点交叉,将两个基因串对应交叉位的值相结合生成新的基因串。
重复选择交叉和变异操作,直到网络达到精度要求。
3实验
用简化的海底管道检测装置(漏磁检测部件中仅安装一排7个漏磁传感器和一个温度传感器),在实验室条件下,取10个温度点(-10~80℃,每10℃一个点),分别对一个半剖管道进行检测。该管道和实际海底管道具有相同材质和管径(195 mm),并按美国无损检测标准要求,用电火花加工的方法,在其内表面加工了多处不同尺寸、形状和类型的缺陷。在每个温度点处,每个漏磁传感器取55个数据,组成55组数据,取44组作为训练样本数据,11组作为测试数据,用上述神经网络方法进行训练和测试,实现温度误差的融合补偿。由于是多维输入,训练速度较慢。在网络误差设为0.001的情况下,用高斯函数训练,一般需要经过2 300步左右网络才可以满足要求。用遗传算法训练,只需要1 700步。
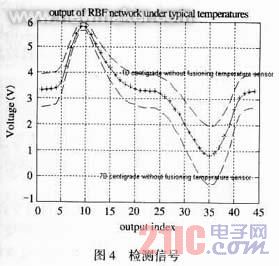
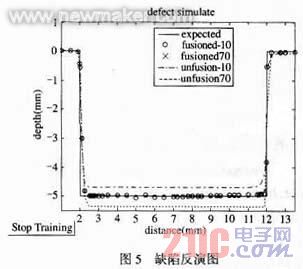
对一个长10 mm,深5 mm的标准矩形缺陷进行检测,在两个典型温度点下的网络输出见图4。图中实线是期望的输出,两条虚线分别是70℃和-10℃下,未融合的输出,“ ○”线和“+”线是这两个温度点下融合后的输出。由图可见,融合前的两条输出波形偏离目标曲线,而且表示缺陷特征的波峰波谷的水平和竖直间距与目标值有一定的差距。融合后的输出与期望值几乎重合,补偿效果显著。图5是反演后的缺陷图。线型的意义与图4相同。-10℃和70℃下的数据融合后反演出的缺陷与实际缺陷基本重合。未融合数据反演出的缺陷与实际缺陷深度有偏差。
定义传感器的温度敏感系数αS为在工作温度范围内,温度变化1 K所引起的输出电压最大相对变化的平均值。
![]()
其中,S∈(1,2,…,44)为测量点序号,随着装置在管道内爬行,代表不同的检测位置。t1、t2是工作温度的上、下限值,U(t1)、U(t2)是S处温度分别为t1、t2时传感器的输出值。用测试数据对网络进行校验,检验网络的灵敏度和适应能力。融合前后7个传感器的平均温度敏感系数分别为3.1×10-3K-1和2.3×10-5K-1。可见,多传感器融合进行温度补偿后传感器的温度敏感系数降低了两个数量级。
4结论
该文将数据融合理论和神经网络方法应用到漏磁传感器误差补偿中,大大提高了漏磁检测传感器的稳定性和准确性。对多个漏磁传感器和温度传感器检测数据融合后,输出值的温度敏感系数降低了两个数量级,为整个检测系统在高温环境下测得高准确度的结果提供了保障。当 输入节点多时,用遗传算法比用高斯函数训练网络速度快。