
0 引言
近年来随着新材料技术的发展,特别是稀土永磁材料,磁性复合材料的出现,加之我国拥有世界上最大的高能量密度永磁材料(钕—铁—硼)的储量,使得永磁电机活跃在各个工业生产中。永磁同步电机(PMSM)是近几年发展起来的一种新型的电机,具有转子转动惯量小、效率高、功率密度大、可靠性高的优点,因此十分适合应用于高性能伺服系统中,例如在数控机床等场合,永磁同步电动机正在逐步取代直流电机和感应电机。同时由于永磁同步电机无需激磁绕组,明显地减小了体积,减轻了重量,降低了损耗,避免了电机发热,从而提高了效率和功率因数,具有明显的节能效果。
尤其在现代的PMSM 运动控制系统中,它比异步电动机更便于实现磁场定向控制,可以获得与直流电动机一样优良的转矩控制特性,使控制系统具有十分优良的动、静态特性。
1 永磁同步电机的种类和基本结构
就转子结构看,永磁同步电机分凸装式、嵌入式和内埋式三种基本形式,如图1 所示,前两种又统称为外装式结构。凸装式直轴磁阻与交轴磁阻相等,因此交、直轴电感相等,即Ld=Lq,表现为隐极性质;另外两种结构,直轴磁阻大于交轴磁阻,因此Ld
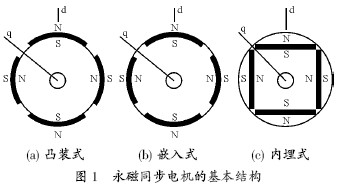
凸装式结构简单便宜,应用较多。这种结构中电机转子直径变得较小,从而导致电机的小惯量,故适用于伺服系统。然而在PMSM中小电感不总是有利,因为小电感将导致弱磁控制。在弱磁控制期间虽然电压已经达到逆变器所能提供的最大值,但速度依然需要不断上升。弱磁控制是通过增加反相直轴定子电流分量实现的,若电感很小,就只能通过很大的去磁电流和低负载实现弱磁。
嵌入式结构可增大漏磁链,因增大的交轴电感使电枢的反应增大,致使极角增大和转矩降低。
内埋式电机虽然结构复杂、昂贵,但它具有高气隙磁通密度,因此它产生的转矩比凸装式电机产生的转矩大,且气隙磁通易于正弦分布,从而降低齿槽转矩效应。
2 永磁同步电动机的特点
与传统异步电机相比,永磁同步电机具有以下特点。
1)高效率、高功率因数、节能用永磁体代替电励磁,不需要无功励磁电流,可以显著提高功率因数。定、转子同步,转子铁心没有铁耗,PMSM 的效率较电励磁同步电机和异步电机要高。而且,PMSM 在25%耀120%额定负载范围内均可以保持较高的功率因数和效率,使电机在轻载运行时的节能效果更为显著,这样,在长期的使用中可以大幅度地节省电能。
2)动态响应快速、转速平稳PMSM 与异步电动机相比,具有较低的惯性,对于一定的电动机转矩具有较快的响应,即转矩/惯性比高。
3)体积小、重量轻随着高性能永磁材料的不断应用,PMSM 的功率密度大大提高,与同容量异步电机相比,其体积和重量有较大的减少。
4)应用范围广、可靠性高在医疗器械、化工、轻纺、仪器仪表等领域均获得应用。与直流电动机和电励磁同步电动机相比,永磁同步电动机没有电刷,简化了结构,提高了可靠性。
3 永磁同步电动机控制策略
永磁同步电机的调速主要通过改变供电电源的频率来实现。目前常用的变频调速方式有转速闭环恒压频比控制(v/f)、转差频率控制、基于磁场定向的矢量控制(Vector Control)以及直接转矩控制(Direct Torque Control)。
3.1 转速闭环恒压频比控制
转速闭环恒压频比控制是一种最常用的变频调速控制方法。该方法是通过控制V/f恒定,使磁通保持不变,并以控制转差频率来控制电机的转矩和转速。这种控制方法低速带载能力不强,须对定子压降实行补偿,因该控制方法只控制了电机的气隙磁通,不能调节转矩,故性能不高。但该方法由于实现简单、稳定可靠,调速方便,所以在一些对动态性能要求不太高的场合,如对通风机、水泵等的控制,仍是首选的方法。
3.2 转差频率控制
转差频率控制的突出优点就在于频率控制环节的输入是转差信号,而频率信号是由转差信号与实际转速信号相加后得到的,这样,在转速变化过程中,实际频率随着实际转速同步地上升或者下降。尽管转差频率控制能够在一定程度上控制电机转矩,但它依据的只是稳态模型,并不能真正控制动态过程中的转矩,从而得不到很理想的动态控制性能。
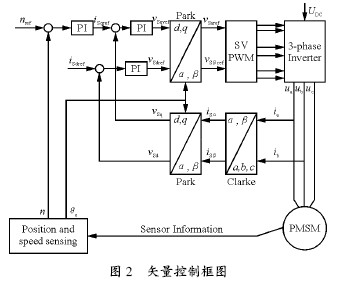
3.3 矢量控制
矢量控制框图如图2 所示。
1971 年,西门子工程师Balschke 首次提出矢量控制理论,使交流电机控制理论获得了一次质的飞跃。其基本思想为:以转子磁链旋转空间矢量为参考坐标,将定子电流分解为相互正交的两个分量,一个与磁链同方向,代表定子电流励磁分量,另一个与磁链方向正交,代表定子电流转矩分量,分别对它们进行控制,获得像直流电动机一样良好的动态特性。因其控制结构简单,控制软件实现较容易,已被广泛应用到调速系统中。但矢量控制方法在实现时要进行复杂的坐标变换,并需准确观测转子磁链,而且对电机的参数依赖性很大,难以保证完全解耦,使控制效果大打折扣。
采用矢量控制理论进行控制时,具有和直流电动机类似的特性。矢量控制的优点在于调速范围宽,动态性能较好。不足之处是按转子磁链定向会受电动机参数变化的影响而失真,从而降低了系统的调速性能。解决方法是采用智能化调节器可以提高系统的调速性能和鲁棒性。
文献[20]和文献[21]采用PI 控制,文献[20]中电流环、速度环均采用PI 调节,由仿真结果得出:PI 控制器的参数对系统的性能有极大的影响,永磁同步电机是一个具有强耦合的非线性对象,很难用精确的数学模型描述,而PI 控制器是一种线性控制器,鲁棒性不够强,所以,在调速系统中难以达到令人满意的调速性能,尤其是在对系统性能和控制精度要求较高的场合,这就需要对PI 算法进行改进,以达到更好的控制性能。文献[21]通过多次仿真,在速度调节中只单纯采用PI 调节效果并不理想,为此,提出了采用分段PI 速度调节的方法,即根据误差量的大小分段确定参数Kp,Ki。在初期,可加大比例调节成分,随着误差减小适当加大积分系数,这样系统能较好地实现永磁同步电机的调速及其正反转控制。
文献[1]对PMSM的电压空间矢量的弱磁控制方面所做的研究,提出一种基于空间矢量PWM(SVPWM)的PMSM 定子磁链弱磁控制方法,在电机转速达到基本转速之前采用最大转矩/电流策略控制,超过基本转速之后采用弱磁扩速的电流控制策略,使电机具有更大的调速空间,该策略可实现电压矢量近似连续调节,同传统的有限的离散空间矢量相比,有效减小了PMSM的转矩脉动,提高了系统的性能。
3.4 直接转矩控制
直接转矩控制(DTC)框图如图3 所示。
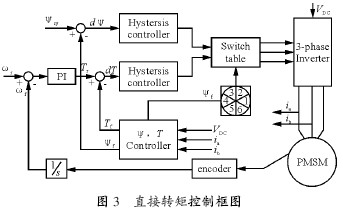
1985 年,Depenbrock 教授提出的高性能交流电机控制策略,摒弃了矢量控制的解耦思想,不需要将交流电动机与直流电动机作等效与转化,省去了复杂的坐标变换;采用定子磁场定向,实现了在定子坐标系内对电动机磁链、转矩的直接观察、控制,定子磁链的估计仅涉及定子电阻,减弱了对电机参数的依赖性,很大程度上克服了矢量控制的缺点。且控制简单,转矩响应快,动态性能好。开始时是使用于异步电机控制中,后来逐步引用于同步电机中。1997 年,L.zhong,M.F.Rahman 和Y.W.Hu 等人把直接转矩控制与永磁同步电机结合起来,提出了基于永磁同步电机的直接转矩控制理论,实现了永磁同步电机直接转矩控制方案,并且成功地拓展到了弱磁恒功率范围,取得了一系列成果。
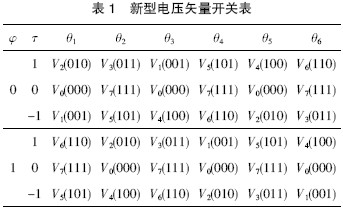
直接转矩控制技术是继矢量控制后发展起来的,最早应用在感应电机中,随后应用到永磁同步电动机控制系统中。永磁同步电动机不能像异步电机那样用零电压矢量降低转矩,而采用反向电压减小转矩,这样会产生较大的转矩波动。文献[2]分析了零电压矢量在异步电机和同步电机中的不同作用,构造了一种应用零电压矢量来减小转矩的新型电压矢量开关表,如表1 所列,可以改善转矩脉动和系统性能。文献[11]也构造了一种新型的含零电压矢量的控制开关表,改变了传统的控制系统。并通过仿真结果表明,正确地使用零电压矢量能够有效减少转矩脉动,改善系统性能。直接转矩控制的系统能以较大的转矩启动,并且含零电压矢量的系统的转矩平稳性较好,转矩波动比较小,并且在扰动后能在较短的时间内恢复稳定。
传统DTC 采用的是按一定规则从预制的开关表中选取近似合适的电压空间矢量对电机转矩和磁链进行控制,由于所选的空间电压矢量有限,不同程度地导致DTC 系统出现较大的磁链和转矩脉动。文献[3]介绍分析了SVM(空间矢量调制)是在一个控制周期内,通过相邻基本电压矢量和零矢量合成,得到所需的任意电压矢量,实现电压矢量的线性连续可调。SVM DTC 控制可在不改变系统硬件结构的条件下,获得更多的连续变化的电压空间矢量,进而实现对电机磁链和转矩更精确的控制,从而降低转矩脉动。
在改进PMSM 控制方法和性能上,文献[4]和文献[5]提出了新的方法,文献[4]在矢量控制策略基础上提出了一种高精度混合控制方法,综合利用自控方式与他控方式各自的优点,在动态情况下,采用自控方式对控制系统输出电压进行快速调节,提高系统动态响应能力以及增强系统稳定性,当电机进入稳态运行时切换到他控方式,从而提高电机稳态性能指标,减小转速波动和转矩脉动,兼顾调速系统动态性能和稳态性能,取得了更好的控制效果。文献[4]还对目前永磁同步电动机控制系统转子初始位置检测方法进行了分析与对比研究,给出基于渐变电压矢量法的转子初始位置检测简单有效的检测方法,主要是因为当给定电压矢量接近永磁体转子轴线时,可能会出现方向判断失误的情况。可以采用表决机制,多次测量后确定检测结果,以保证结果的正确性和更高的检测精度。并将模糊控制、神经网络控制与传统的PID控制器结合,使系统有更好的动、静态特性。
文献[5]从开关频率优化和电压空间矢量合理选择两个方面提出了一种新的转矩调节方法,即通过逆变器开关频率PI 调节得到转矩滞环比较器的滞环宽度值。这样在充分利用功率器件开关频率的同时不仅克服了圆形磁链轨迹对功率器件高开关频率要求的缺陷,而且克服了在转速变化过程中采用固定滞环宽度值带来的功率器件开关频率波动范围大及由此造成低速转矩调节性能下降的缺陷。
文献[12]对永磁同步电机直接转矩控制中磁链观测这一关键技术进行了研究,设计了一种新型磁链观测器———非线性正交反馈补偿磁链观测器。磁链观测是直接转矩控制技术中关键部分,直接关系到电机的运行性能和直接转矩控制方案效果,适合永磁同步电机直接转矩控制应用的新型非线性正交反馈补偿磁链观测器算法可以用式(1)表示。

通过仿真,采用的基于非线性正交反馈补偿的磁链观测器不仅能在高速下准确观测磁链,而且能有效地解决传统电压积分方法在低速时的不足和弊端,从而验证了基于非线性正交反馈补偿的磁链观测器在理论上的可行性。系统的动态响应快,稳态运行平稳,电流正弦,磁链能够运行在圆形轨迹上。

3.5 基于无传感器控制
通常,高性能的调速系统离不开闭环控制,但速度传感器的安装带来了系统成本增加、体积增大、可靠性降低等问题。因此无速度传感器控制技术成为研究热点,其核心是如何准确获取电机的转速信息。
文献[14]指出,代表性的方案有:瞬时转速估计法,PI 控制器法,模型参考自适应系统法,扩展卡曼滤波法,基于神经网络的方法。
文献[6]提出了在无位置传感器的条件下检测转子初始位置的方法,适用于凸极和隐极同步电动机,受电动机参数影响比较小,在静止、低速、高速范围内均可以估计出转子的实际位置,通过向电动机的定子绕组施加高频检测电压,利用空间凸极效应即可确定转子的初始位置。
文献[15]指出,早先的无传感器控制方法主要集中在高速条件下,有:磁链位置估算法,特点是简单而易于实现,但算法性能取决于电压、电流的测量精度及电机参数准确性;扩展卡曼滤波法,可以直接获得定子磁链矢量和转子位置的估计值,能很好地抑制测量和扰动噪声,但算法对电机参数有较强的依赖性,同时卡尔曼增益也很难确定。
文献[15]针对表贴式永磁同步电动机,在任意同步旋转坐标系上利用电机稳态操作的结果估计反电动势,进而实现了转子位置和转速的估计,采用的反电动势常数补偿算法,系统对反电势参数的变化相当稳健。该方法的位置和速度估计精度高,速度控制范围宽。
文献[13]介绍了针对内嵌式永磁同步电动机的凸极原理,并且基于这个原理介绍了一种根据输入电压检测电流大小的方法,实现简便,且没有依赖电机参数,建立数学模型或要进行复杂计算等缺点。仅需要在原有的电机驱动电路的基础上增加一套针对初始磁极位置检测的程序即可。整个程序分为三个部分:第一部分是测量并比较0毅和180毅电角度的电压矢量,并选择一个大的电压矢量作为起始的角度;第二部分将整个电气360毅周期分为12 个区域,每30毅一格,从0毅或者180毅开始,测量给定电压矢量的电流,在保证测到最大电流时,减少测量的步数,使得测量的时间也尽可能的缩短;第三步则是进一步细分角度,利用二分法来精确的检测磁极位置的角度。这种方法实现起来简便,无须预知电机的参数,无须增加硬件设备,仅须在每次启动电机时导入相应程序即可。
4 永磁同步电机未来研究热点
1)在材料技术方面,随着半导体技术的不断进步,使永磁同步电机体积能够再减小。
2)在电机控制方面,研究如何进一步提高无速度传感器直接转矩控制性能。
3)有无速度传感器控制的速度辨识的研究、矢量控制的鲁棒性研究,直接转矩中电压矢量选择智能化的研究。
4)永磁同步电机控制系统稳定性的问题,研究哪些因素对稳定性有影响。
参考文献:
[1] 冷再兴. 永磁同步电动机弱磁调速控制[D].华中科技大学,2006.
[2] 张昱,张兴. 永磁同步电机直接转矩控制系统的改进[J].合肥工业大学学报,2007.
[3] 徐华中,刘鹏. 一种改进的永磁同步电机直接转矩控制仿真[J].武汉理工大学学报,2008.
[4] 朱洪海. 永磁同步电动机控制系统及其控制方法研究[D].浙江大学,2006.
[5] 许峻峰. 提高永磁同步电动机调速系统性能方法研究[D].西南交通大学,2005.
[6] 郭熠. 永磁同步电动机转子初始位置检测方法[J].微电机,2004.
[7] J S Kim and S K Sul.New Stand-still Position de-tection Strategy for PMSM Drive without Rotational Transducer[J].Conf. record of IEEE,QPEC,1994:363-369.
[8] D W Chung,J Kang,S K Sul.Initial Rotor Position Detection of PMSM at Standstill without Protational Transducer [J]. Electric Machines And Drivers,1999. International Conference IEMD 99.9-12,1999,(5):785-787.
[9] P L Jansen,R D Lorenz.Transducerless Position andVelocity Estimationin Induction Machines and Salientac
Machines [J]. IEEE Transactions on Industry Applications,1993,31(2):240.
[10] Yuhong Z,Kenneth A. Adaptive Flux and Speed Estimation for Induction Motors[C]. Proceedings of American Control Conference, San Diego, California,1999,2521-2525.
[11] 徐生林,郑敏,卢航远,杨成忠.永磁同步电机直接转矩控制的改进与仿真[J].机电工程,2009,26(2):38-41.
[12] 查焱,芮延年,孟淮玉,杜海军.永磁同步电机直接转矩控制的磁链观测研究[J].江苏电器,2008,5:10-11.
[13] 季荣斌,范启富,朱武标.一种新型的永磁同步电机磁极位置检测方法[J]. 兰州工业高等专科学校学报,
2009,16(1):26-28.
[14] 骆再飞,蒋静坪,许振伟.交流伺服系统及其先进控制策略综述[J].机床与液压,2002,6:7-10.
[15] 曾岳南,毛宗源,罗彬,暨棉浩.永磁同步电机无位置速度传感器控制[J].电力电子技术,2006,40(4).
[16] 赵越岭,王燕秋,王英丽.无速度传感器直接转矩控制系统的转速估算方法综述[J]. 辽宁工学院学报,
2003,23(6).
[17] Tajima Hetal. Speed Sensor-less Vector Control method for an Industry Drive System [J]. IEEE. PCC,Yoko-
Hama,1995: 1034-1039.
[18] 贾洪平,贺益康.永磁同步电机直接转矩控制中零矢量的作用研究[J].电气传动,2006,36(4): 13-17.
[19] 郭绪猛,刘景林.永磁同步电机直接转矩控制研究与仿真[J].微电机,2007,40(4): 12-14.
[20] 林辉,刘军.基于矢量控制的永磁同步电机研究[J].电机设计,2009.
[21] 暨绵浩,曾岳南,曾建安,等.永磁同步电动机及其调速系统综述和展望[J].电气时代,2005,5: 20-23.
[22] 林立,黄声华.基于矢量控制的高性能异步电机速度控制器的设计[J].电子技术应用,2006 (2): 102-105.
[23] Bouchikers,Capolinoga. Vector Control of a Permanent-Magnet Synchronous Motor Using AC-AC Matrix
Converter [J].IEEE Transactions on Power Electronics,1998,13 (6):1089-1099.
[24] 王春民,孙淑琴,安海忠,等.基于DSP永磁同步电动机矢量控制系统的设计[J].吉林大学学报:信息科学
版,2008,26 (4): 343-346.
[25] 林利华,胡育文.磁链观测器的实现[J].电源世界,2004(4).
[26] 郭前岗,李耀华,孟彦京.现代交流传动系统调速技术综述[J].微计算机信息(测控自动化),2004,20(11).
[27] 李正熙,王占扩,杨立永.永磁同步电动机直接转矩控制策略综述[J].变频器世界,2006.
[28] 谢运祥,卢柱强.基于MATLAB/Simulink 的永磁同步电机直接转矩控制仿真建模[J]. 华南理工大学学报
(自然科学版),2004,32(1).
[29] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002(2):8-11.
[30] 谢成祥.永磁同步电机直接转矩控制系统的分析与仿真研究[J]. 华东船舶工业学院学报(自然科学版),
2004(6):39-43.