
许多较老的单片降压型开关调整器采用了片上反馈环路补偿。尽管这有助于实现非常简单的设计流程,但是,它通常不容许对环路动态特性进行最优化。结果就是需要选择功率路径元器件以适应反馈环路的要求,一般来说,这是达不到最优化的安排。例如,给定的调整器可能要求用户在给定的范围内选择电感器以及输出电容器,以确保在反馈补偿电路具有双零点的位置出现LC双极点频率。虽然你可能获得一个稳定的环路,但是,你可能不具备满足电源路径要求的、接近理想的数值。
解决方案就是依赖于外部由用户选择的环路补偿。然而,那对于新的用户可能会存在一些问题。反馈环路被认为是难以补偿的!在上世纪80年代,最初引入的一种创新就是采用电流模式控制。那个控制配置把输出滤波器的阶数降低了1阶,由一阶滤波器系统来实现,从而极大地简化了环路补偿的设计任务。然而,电流模式控制并不是像最初希望的那样是万能药。噪声灵敏度就是一个主要问题。
最新开发的电流模式控制的版本被称为仿真电流模式控制(ECM),它极大地改善了以非常高的降压比率工作的能力,与此同时,维持良好的抗噪声特性。因此,对于输入电压额定值高达75V的情况,有可能在许多高输入电压应用中拥有很大的设计裕量,与此同时,仍然能够产生当今数字电路所采用的那种输出电压。环路补偿成为了一种相对简单的设计,而现成的软件能够使设计从用户的观点看几乎是微不足道的事情。
传统的电流模式基础
那么,首先要掌握电流模式控制是如何工作的?人们一直企图采用复杂的数学公式来解释电流模式控制的工作原理。然而,笔者一直认为,如果你必须采用数学方法来解释某事,那就是因为你不了解它。因此,让我们看看,我们能否开发一种简单的直觉方法来理解电流模式控制。
基本概念就是把电源级转换为一个电流源,其受控电流的水平由一个误差放大器控制。误差放大器监测输出电压,并根据输出电压与其理想值之间的偏差来控制电流。控制电感电流的常见方法就是测量该电流并当这一电流达到期望电流值时关闭高边FET(控制FET)。
从输出滤波器—由一个跟负载电阻并联连接的电容组成—的观点来看,电感器的构成就像一个可编程电流源。在误差放大器输出中的任何小的信号偏差将导致通过电感器的小的信号电流变化。这些小的信号电流变化流过输出滤波器网络的阻抗,从而导致输出上电压的微小变化。因为输出RC滤波器是一阶系统,对输出小信号响应的控制(也称为安置增益)也是一阶的。因此,系统非常易于进入稳定状态。
ECM基础
大多数传统的电流模式调整器通过监测控制FET的开态电流—ECM—来测量电感器的电流,另一方面,刚好在再次打开控制FET之前测量捕获二极管中的电流。这一信息然后由采样和保持电路捕获,而采样和保持电路由调整器的板上时钟进行门控。
二极管的电流信息被保持,然后,控制FET被打开。接着,小电流源开始为斜坡电容充电,其容值已经被选为正比于电感器的数值。充电电流被编程为正比于输入-输出的电压差。正因为如此,在这个电容上产生的斜坡电压具有正比于电感器电流斜坡的斜率。
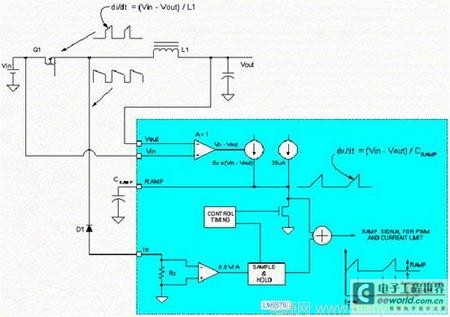
图1:仿真电流模式控制方框图。
当斜坡电压接着被叠加至以前采样下来的电流测量值之上,结果得到一个看起来很像控制FET的电流波形的梯形波形,减去所有常见的非理想特性。这就赋予ECM精确地控制非常窄脉冲的开关的能力,这是大降压比率调整器非常需要的一种特性。然而,问题依然存在,小信号的行为仍然是电流模式调整器所期望的那样吗?实际上,下面的测量绘图表明,显然就是所期望的那样。
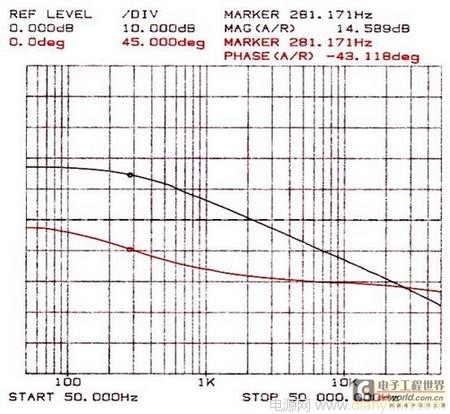
图2:ECM信号行为图。
利用干净的、具有宽工作范围的、单极点控制架构,最终用户拥有利用这种便于补偿的特点的灵活性,这一点是有趣的。用户可以采用大约在300Hz的一个零点来实现非常简单的、显性的极点补偿。该设计容许从1KHz远至30KHz之间的某个频点出现交叉频率,因为这是简单的RC补偿。正是该控制架构的宽容特性才得以维持环路设计的简单性。
把ECM降低至切合实际
LM5576家族的SIMPLE SWITCHER降压调整器就是利用这种简便的补偿特性,通过可达到的环路补偿把一定程度的控制能力返回给用户,相比之下,以前版本的SIMPLE SWITCHER调整器完全依赖于内部的、工厂预先编程的增益特性。
当然,为了真正利用环路增益的灵活性,工作频率也应该是灵活的。这就容许用户在效率、解决方案的尺寸以及动态性能之间做出性能折中。例如,如果用户要求极佳的动态性能,而效率却是次要考虑,那么,设计工程师可以选择运行在比较高的时钟频率,因此,把LC滤波器中存储的能量最小化,并容许得到更好的瞬态响应。
相反,对于以加大一些电路板空间来获得最优化效率的应用,用户可以选择较低的时钟频率,相关的LC滤波器就较大。归因于滤波器单元中存储的较大能量,动态性能会被打折。然而,在任何一种情形下,环路可以方便地针对选定的LC滤波器元器件以及时钟频率进行裁剪。对于具有很大级别的动态加载的系统,较快的控制环路准许减小输出电容,因此,节省了整个设计的成本。
为了努力最小化用户部分的设计工作量,整个调整器可以采用完全自动化的、著名的专家系统WEBENCH来设计。该软件将生成确实稳定且达到预期功能的各种设计。然而,该软件尚未智能到自己就足以把调整器的动态性能设计为最佳,那还需要少量的用户介入。对于大多数应用来说,那是不必要的。
然而,对于那些在控制环路中需要少许额外带宽的情形来说,用户可以选择调节补偿。各种瞬态仿真的结果可以被观察到,就像观察整个环路增益的波特图一样,而由软件选择的补偿可以被调节,以努力改善环路的动态性能。用户可以自由地把环路带宽推至远远高于工厂在传输函数中开始显示的高频率极点,因此,在稍微牺牲相位裕量的情况下,可以扩展环路带宽,而瞬态动态性能得到了充分的改善。
为了迫使环路进入稳定状态,对于电感器以及输出电容的数值基本上没有限制。在下面的例子中,开关频率被提高至500KHz,从而容许电感器的数值为15uH,而电容器的数值为220uF。与简单的、单片电路调整器相比,结果得到了一个看起来相当好的大负载阶跃响应特性。
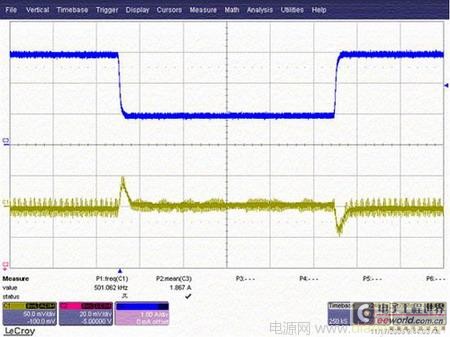
图3:大负载阶跃响应的实例。