
选择最合适的LCD控制方法
摘要: 使用电流泵和梯形电阻的模拟LCD控制标准已经在半导体行业存在20多年了,新一代数字控制方法将会证明其是一个可行的替代方案,因为它们实现的尺寸小,功耗低。
Abstract:
Key words :
摘要
LCD(很多种)已经使用30多年了,其驱动方式已为大家所熟悉,并在过去的20年里一直保持不变。然而,LCD材料的进步以及对密度调制新的认识,使得可以有新的数字方法,其可以升级到芯片过程,可以有更具成本效益的设计。这篇文章将会介绍传统的实现方式,将介绍两种只需要数字信号来驱动LCD的方法。第一种方法依赖于不同频率信号的相关与不相关性,而第二种方法是通过LCD玻璃的低通滤波属性允许它由密度调制信号驱动。我们会介绍这两种技术的优点,如识别率、供电电压的开关电压极限,将会介绍多种电平,多种类型。我们还会示范三种常用的类型。
传统上,LCD控制在微控制器中已经完成,主要通过两种不同方式,但只要是模拟方式实现。这些实现方式包括一个梯形电阻或电流泵,业界更常用的是梯形电阻。使用梯形电阻,一系列的电阻彼此堆叠,形成一个很大的分压器,在这里可以获得多个电平,然后在恰当的时间集合到适当的GPIO,从而产生所需的LCD控制波形,这取决于LCD的MUX值。梯形电阻阻值的选定由芯片实现,在功耗与图象显示品质上都很有效。
LCD是一种理想的电容负载。通过选择一个很大的电阻,由于电容负载不断的充放电,所以会产生失真波形。这可能导致生成不恰当的LCD控制波形,这会影响LCD的显示,因为某些segment可能显得可定义的比其他的多。通过减少电阻值,波形失真可以减少,但代价是增加了功耗。关键是要找到节能和LCD控制波形完整性之间的平衡点。此外,实施LCD驱动模拟子系统需要的成本会变得非常昂贵(由于片内子系统尺寸)。以PSoC 3控制器为例, LCD架构会占用大约~350k平方微米。
当模拟LCD系统主导市场时,与新技术和LCD背后的制造过程相匹配的密度调制理解的增长,使得需要有一个有效驱动LCD的新方法。例如,纯数字LCD控制技术可应用于产生LCD控制信号,当察看LCD时,不能和模拟方法区分开来。与此同时,数字方式还可提供额外的好处。有两个不同但类似的实现方式,包括数字相关和密度调制。
原理
传统上,LCD电流泵或电阻分压器可以产生多个偏置电压,如而产生如图1所示的梯形波形。
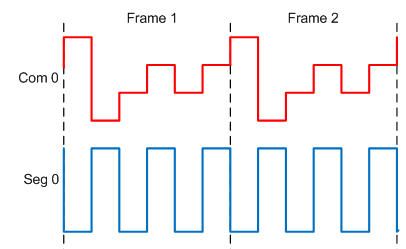
图1 : 传统的模拟控制波形
确切的电压阶数取决于期望的偏置电平。偏置是适用于LCD的电压台阶数目。精确的数目依赖于Mux比率,即LCD中common数目的倒数。例如,一个4common的LCD mux比率是1/4。然后使用这些多重电压来保持适当的电平,以保持某段的开或关。每common所需的偏置数量可以通过方程1计算出来。
 方程1
方程1
这种方法的优势是可以产生高识别率,但它会造成潜在的功耗成本和芯片实现成本的提高。使用数字相关技术,不是使用多个模拟电平,而是使用标准数字逻辑电平, LCD控制波形在合适的时候在Vdd和地之间切换。这种方法有两个主要优势。首先,使用这种技术,可以用非常有限的硬件实现(如定时器或PWM),使用DMA或微控制器控制固件和ISR。目前市场上可用的微控制器和FPGA具备实现这种控制技术所需的资源。这种方法的第二个主要优势是,这种实现也可以很容易地在低功率模式下使控制系统驱动LCD。当器件由定时器ISR触发唤醒开始下一桢时,控制器件只需要调整GPIO到逻辑高电平或低电平,然后返回低功率模式。GPIO将会保持进入低功耗模式时的引脚状态,因此在低电源模式不需要大量的内部部件处于active。由于数字相关的LCD控制所需的管理步骤很简单,active模式需要的时间就很少,所以可以最大限度地节省功耗。下图给出了使于数字相关控制波形的一个例子,见图2。
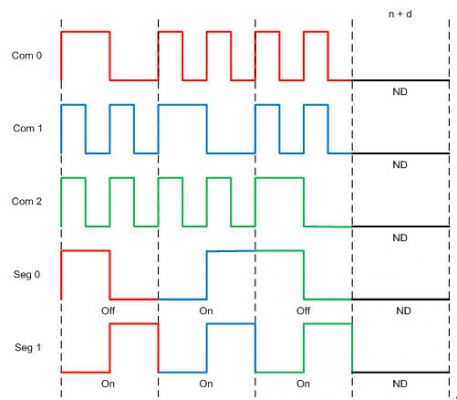
图2 数字相关控制波形
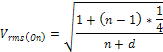
控制波形是这样产生的,选中底板(common)时是segment波形相关信号,不选是不相关信号。在子桢周期结束的时候,实现停滞状态。与传统的模拟方法不同,可以用DAC产生各种偏置水平,需要调整LCD RMS的电压来产生适当的开关电平。由于经过segment的电压与的segment and common(Seg-Com)的电压不同,通过驱动这两条线到相同的电平, 5 V或0 V,就会产生一段时间的0 V,从而影响到经过segment的RMS电压。LCD的每一segment都有一个Von和Voff阈值电平。这些阈值电平可以通过下列方程计算,这里“ d”代表停滞状态数目,“ n ”代表common数。

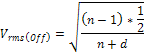
方程2


方程3
识别率是很重要的参数,其定义为VRMS(On) 和VRMS(Off)之间的比率。其差距较大,将会显示越多的定义了的开关segment。如果这两个参数太接近,它就很难区分开和关的segment。计算数字相关识别率的方程如下。

方程4
从这个方程可以看出,随着LCD common数量的增加,识别率会降低。在任何控制方法中识别率都是这样的。识别率并不像理想的模拟控制方法那么有效率,不过对于当今的4common LCD来说已经足够了。
使用密度调制,由系统内PWM组成,可以产生类似传统模拟方法的波形。理想情况下,LCD模型是一个电容。然而,由于LCD玻璃的固有特性, LCD模型更像一个滤波器。LCD的这些固有特性在这种情况下是有利的。通过改变PWM参数,LCD的滤波器特性可用于生产直流电压。通过这种方法,产生的波形和图1所示的传统模拟方法非常相似。
该方法的最大优势是成本。由于是数字硬件来产生波形,数字元件比模拟硬件占用的die要小。开始PSoC3给出的值是近似~ 350 k 平方微米。通过切换到纯粹的数字系统,估计这个数字会降低到大约5.5 k平方微米。实现数字系统比相应模拟器件来说还会明显减少芯片设计风险。请注意,这一切随之而来的代价是更高的功率消耗,这是由于PWM需要更高速度的时钟。然而,在LCD管脚添加额外的外部电阻可以平衡这种实现的功耗。


方程5

方程6
这种方法的识别率比数字相关更高,可以产生更多的可定义的显示,如方程7所示。

方程7
实现
下面的工程范例是使用PSoC 3/5在PSoC Creator环境中实现和配置的。这个项目配置为可以实现数字相关和密度调制两种方法,1/2 和1/3偏置。在工程文件中通过简单地改变一些参数,工程文件就可以实现任何LCD控制技术。有两个主要的LCD控制部分。第一个驱动控制排序,如图3所示。第二部分是引脚驱动逻辑,见图4,其获得各种控制和驱动信号,并用适当的逻辑结合来生产所需的驱动波形。

图 3 数字LCD控制控制和驱动排序
序列器是用来指示正在生成控制波形子帧,同时决定波形信号是否需要倒置。这个模块扮演了一个连续循环的状态机角色。一旦整个LCD波形产生,它会翻转并重新开始。图3中所示为4 common 显示配置。然而,通过增加SubFrame[0..1]的尺寸,这个序列器可以扩展到多达16common。
PWM的停滞状态主要是用于控制差异,可以通过调整之前提到的RMS电压实现。通过改变PWM停滞时间参数,将common 和segment驱动为低的时间增加,从而降低LCD控制的RMS电压。
PWM偏置产生了两个PWM信号:一个高电平信号和一个低电平信号。当提到LCD为1/2, 1/3,或1/4偏置时,指的是结合系统的高、低电平产生所需的最终电平。


此内容为AET网站原创,未经授权禁止转载。