
本文详细的介绍了紫金桥组态软件与Matlab进行通信的过程。
Matlab7.0以上版本中集成了 0PC工具箱 I5 (MAT—LAB 0Pc Toolb0x),它是一个客户端软件,提供了一种服务器和客户端互访的通用机制,应用于 0PC客户端数据访问,通过OPC工具箱不需了解 0PC服务器的内部配置和具体操作,就能连接任何一个 0PC服务器。紫金桥可以作为 0PC服务器与作为 0PC客户端的 MATLAB相连接,为其提供读写紫金桥内部数据的功能。
利用MATLAB OPC Toolbox实现 MALTAB与紫金桥实时通讯需要做下面两项工作:
1) 在安装MatLab时,默认情况下是不安装OPC工具箱的,如果没有安装OPC工具箱,那么在使用 OPC工具箱之前需要安装到计算机中去,在 MATLAB环境中使用命令opcregister(‘install’) 来安装。
2) 为使 OPC工具箱中的对象和 OPC服务器对象之间建立连接,还需要在 OPC服务器和 OPC客户端进行分布式 COM的环境设置。
为了说明紫金桥与Matlab进行通信,我们在紫金桥软件组态软件中建立一个“紫金桥仪表仿真驱动”:设备名为“RealInfo”;接着建立两个点,点类型为:“模拟I/O点”,名分别为:A1和A2;A1连接三角波寄存器,值的范围为0-300,A2连接正弦波寄存器,值的范围为0-500;
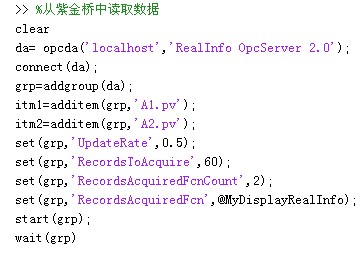
一、利用Matlab命令访问紫金桥OPC服务器的代码如下:
Matlab命令行代码如下:
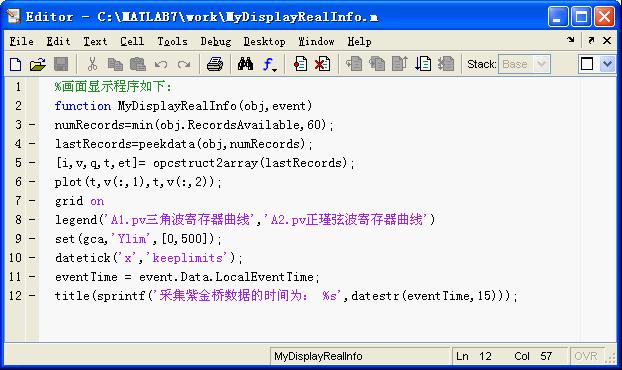
Matlab画面显示函数:
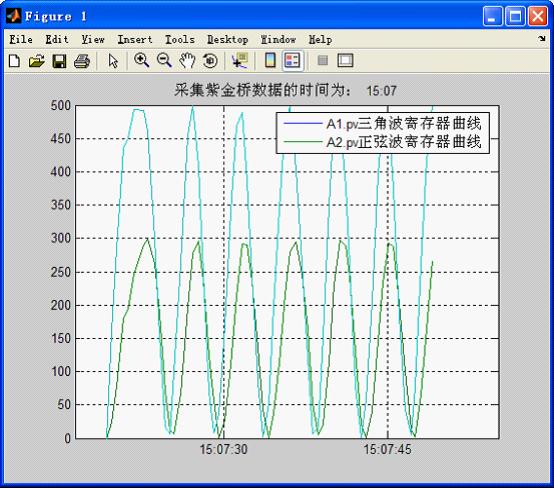
运行紫金桥软件和Matlab。
下图是MATLAB采集紫金桥软件的实时数据,并进行实时绘制的二条曲线。
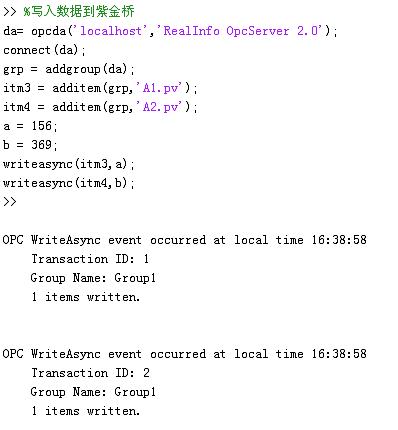
二、利用MATLAB向紫金桥软件中写入数据,代码与执行成功提示信息如下:
通过上面简单的操作,就完成了紫金桥软件和MATLAB进行通信的过程。
总结:
在上面的实例中,可以看到两者优势的结合对于开发出一个控制系统是非常方便和容易的。
由紫金桥组态软件完成对现场的数据采集、监控画面绘制、历史数据保存等功能,由MATLAB利用其功能完善的工具箱,实现复杂的控制算法,如神经网络等等,这样就可以得到一个完美的控制功能。