
1 引言
目前,我国电网的建设和运行中长期存在的一个问题是无功补偿容量不足和配备不合理,特别是可调节的无功容量不足,快速响应的无功调节设备更少。近年来,随着大功率非线性负荷的不断增加,电网的无功冲击和谐波污染呈不断上升的趋势,无功调节手段的缺乏使得母线电压随运行方式的改变而变化很大,导致电网的线损增加,电压合格率降低。此外,随着电网的发展,系统稳定性的问题也愈加重要。动态无功补偿技术是一种提高电压稳定性的经济、有效的措施。另外,动态无功补偿技术在冶金、电气化铁路、煤炭等工业领域的客观需求也很大。在目前情况下,采用tcr静止型动态无功补偿装置(svc)对于消除轧机和其他大型电动机等对称性负载所产生的无功冲击是很有效的,电网电压波动明显改善,功率因数明显提高,是一种技术含量高、经济效益显著的新型节能装置。
2 svc的基本类型和结构
svc的补偿原理是通过控制晶闸管触发角,改变接入系统中的svc等效电纳的大小,从而使svc达到调节无功功率的目的。静止电抗器" title="电抗器">电抗器的静止无功补偿装置(saturatedreactor- sr);第二类是晶闸管控制电抗器(thyristor control reactor—tcr),晶闸管投切电容器(thyristor switch capacitor- tsc),这两类装置通称为svc (staticvar compensator)。
2.1 具有饱和电抗器的补偿器" title="无功补偿器">无功补偿器(sr)
饱和电抗器分为自饱和电抗器和可控饱和电抗器两种,相应的无功补偿装置也就分为两种。具有自饱和电抗器的无功补偿装置是依靠电抗器自身固有的能力来稳定电压,它利用铁心的饱和特性来控制发出或吸收无功功率的大小。可控饱和电抗器通过改变控制绕组中的工作电流来控制铁心的饱和程度,从而改变工作绕组的感抗,进一步控制无功电流的大小。sr的缺点是:造价高、损耗大、有振动和噪声、调整时间长、动态补偿速度慢。由于具有这些缺点,所以饱和电抗器的静止无功补偿器应用的比较少。
2.2 晶闸管投切电容器(tsc)
单相tsc的原理,是采用两个反并联的晶闸管起到将电容接入电网或从电网中断开的作用,而串联小电感可以抑制电容器投入电网时可能产生的冲击电流。tsc的关键技术是投切电容器时刻的选取。经过多年的分析与实验研究,其最佳投切时间是晶闸管两端的电压为零的时刻,即电容器两端电压等于电源电压的时刻,此时投切电容器,电路的冲击电流为零。这种补偿装置为了保证更好的投切电容器,必须对电容器预先充电,充电结束之后再投入电容器。tsc的优点在于它能对三相不平衡负载进行分相补偿,操作中不产生有害过电压,但是它对于由于负载的突变引起的电压闪变,单靠电容器投入电网的电容量的变化进行调节是不够的,因此tsc装置一般与电感相并联,采用tcr与tsc配合使用构成混合型补偿器,这种补偿器以电容器作分级粗调,以电感作相控细调。但是,svc装置在动态调节无功功率时不可避免的会产生大量谐波,需要将固定电容器和电感串联构成谐波滤波器来滤除谐波。而且svc运行时电容和电感的一部分容量相互抵消,不经济,且电容分组不连续投切会影响调节质量。
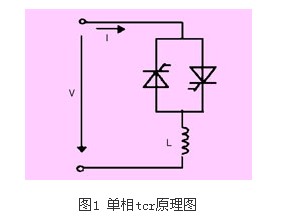
2.3 晶闸管控制电抗器(tcr)
单相tcr原理如图1所示,由两个反并联的晶闸管与一个电抗器串联组成。其三相多接成三角形,这样的电路并入到电网中相当于接入了电感性负载的交流调压电路。此电路的有效移相范围为90°~180°。根据晶闸管的导通角与tcr的等效电纳间的关系可知,当触发角为90
°时,晶闸管全导通,晶闸管串联的电抗全部接入电网上,此时电抗器吸收的无功电流最大。当触发角在90°~180°之间时,晶闸管部分区间导通。增大触发角即可减小补偿器的等效电纳,这样就会减小补偿电流中的基波分量,即减少了吸收的无功功率。所以通过调整触发角的大小就可以改变补偿器所吸收的无功分量,达到调整无功功率的效果。
3 svc的基本控制原理
svc控制系统包括四个部分。
第一部分为“tcr基波电流(或电抗)参考值计算”,即根据装置的无功电流(或功率)需求,计算其中的tcr基波电流(或功率,或电抗)参考值;如果装置的参考输入为无功电流需求,实时测得fc支路的电流有效值,则tcr支路电流的参考值即为前者减去后者。
第二部分为“触发延迟角计算”,即根据tcr的无功电流或电抗的参考值变换得到晶闸管的触发延迟角,有以下几种方法可以实现:
(1) 模拟电路法,通过模拟电路构造模拟函数发生器(analog functiongenerator),将输入信号(如tcr支路的电流参考值)变换成一个与触发延迟角成正比的输出信号。
(2) 数字查表法(digital lookuptable),将输入参考值与触发角的函数关系用一个数字表存储起来,“触发延迟角产生”模块每隔一定的时间,根据输入查表获得对应的触发延迟角。
(3) 微处理器方法(microprocessor based method),采用单片机或者计算机构成信号处理系统,它根据参考输入,实时计算触发延迟角。
第三部分为“同步定时”,即向脉冲控制提供同步用的基准信号,它与输入交流电压频率相同、有固定的相位关系,控制器根据该基准信号产生晶闸管触发脉冲。
第四部分为晶闸管“触发脉冲产生”,即根据“触发延迟角计算”模块产生的触发延迟角,形成晶闸管门极触发脉冲,在适当时刻导通晶闸管,使tcr支路工作。
4 svc的组成部分
高压静止无功补偿装置一次部分主要由电容器、电抗器、晶闸管、空开、接触器等组成;二次部分主要由数据采集板(das),数据处理板(dsp),电源模块、驱动模块等组成。晶闸管的作用主要是控制电抗器的输出电流。
装置启动后,先采集系统的电压量、电流量、接触器位置,计算出系统的功率因数。根据实际功率因数给出控制信号,由驱动模块驱动晶闸管,使晶闸管保持相应的导通角,从而控制整套装置的无功输出,使系统的功率因数满足要求。
5 svc主回路接线方案
图2是svc装置的一次主接线图。svc装置接在单母线上,其中3次、5次滤波器分别为等容量的两组支路,与tcr支路共同接在该10kv母线上。
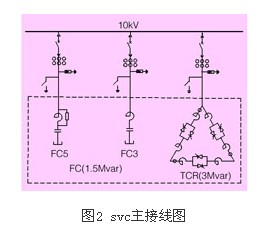
六脉冲tcr由三角形连接的三个单相单元构成,其中,每个单元由一个晶闸管阀和两个分裂电抗器相串联。晶闸管阀由多个晶闸管对串联以获得10kv额定电压和承受正常运行的过电压情况,两组晶闸管在正负半周交替导通,实现对交流电流的开关与控制。
6 结束语
该svc装置已在现场投入运行,并达到了预期的补偿目标,为解决大型冲击性、三相非对称性、低功率因数及非线性负荷给电网带来的公害提供了可行的方案和重要技术手段。