
1 引言
随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以消除谐波源。与传统的二极管不控整流、相控整流相比,四象限变流器具有功率因数高、直流侧电压稳定、输入电流谐波小、开关损耗小、电磁污染少等优点[3]。
四象限变流器的控制策略主要有间接电流控制和直接电流控制两种。间接电流控制通过调节变流器交流侧电压的幅值和相位达到控制输入电流的目的[1]。双闭环直接电流控制在间接电流控制的基础上引入网侧输入电流反馈,具有动态响应速度快、网侧输入电流谐波小和直流侧输出电压稳定等优点[1]。本文首先介绍了四象限变流器的工作原理和数学模型,比较了基于直接电流控制与间接电流控制的四象限变流器工作性能,在此基础上研究了直接电流控制四象限变流器的控制模型与PI参数设计。最后,通过仿真结果验证了本文提出的直接电流控制四象限变流器具备优良的稳态和瞬态工作性能。
2 工作原理
四象限变流器的主电路结构如图1所示。其中UN为输入电压;电感LN为网侧等效电感,起到传递能量、抑制高次谐波、平衡桥臂终端电压和电网电压的作用;RN为网侧电阻;T1~T4为全控型开关器件(如MOSFET、IGBT等);D1~D4为续流二极管;Cdc为滤波电容,为高次谐波电流提供低阻抗通路,减少直流电压纹波;C2、L2分别为二次滤波电容和电感;RL为负载电阻;Udc为直流侧输出电压。
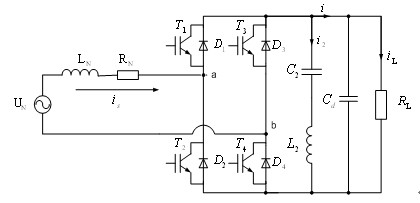
图1 四象限变流器主电路
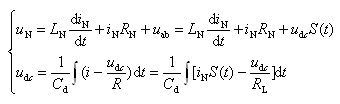
采用单极性调制的时候,变流器交流侧电压Uab将在Udc,0或0,-Udc之间切换。因此,单相四象限变流器主电路的数学模型为:
 (1)
(1)
式中:S(t)整流器开关函数。
3 双闭环控制四象限变流器
3.1 直接电流控制与间接电流控制的比较
直接电流控制,是一种通过直接控制交流电流而使其跟踪给定电流信号的控制方法。控制器具有电流控制环,通过直接对电流调节,使电流快速地跟踪给定值,因此,直接电流控制四象限变换器具有很好的动态性能。另外对电流给定值限幅可以很好地限制输出电流幅值。
间接电流控制也称为相位幅值控制,它通过控制逆变器输入电压的幅值和相位来间接控制输入电流。这种控制方式的稳定性很差,系统动态响应慢,在暂态过程中交流电流可能会出现直流偏移问题和很大的电流过冲。所以尽管幅相位控制已提出了10多年时间,但在实际系统和装置中几乎不被采用。
3.2控制模型的建立
根据四象限变流器的控制原理,得到图2所示四象限变流器双闭环控制框图。
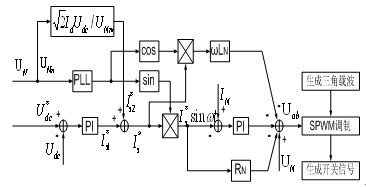
图2 双闭环直接电流控制原理
图中U*d为中间直流侧输出电压给定值,Ud为中间直流环节输出电压,Id为中间直流环节输出电流。为了减轻直流环节中电压环PI调节器的负荷,改善PI调节器的动态响应,用直流环节电流Id计算给定电流的有效分量I*s2,其结果与I*s1相加后作为交流电流的给定值I*s。由图可得电流给定值I*s为:
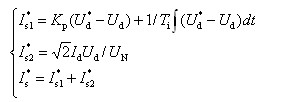 (2)
(2)
锁相环检测网侧输入电压,得到的相位和频率信息作为电流参考信号I*s的相位和频率。电流内环PI调节器输出u2(t)使实际的网侧输入电流IN(t)跟踪给定的电流参考信号I*s,从而实现网侧输入电压与输入电流同相位,也即网侧输入端为功率因数1。结合图2和以上分析可得:
3.3双闭环直接电流控制PI参数的设计
3.3.1 电流内环的设计
电流内环使输入电流跟踪指令电流,能够提高系统的动态响应能力。考虑到参数准确性和漂移,以及实现电流控制无静差,本文选用PI调节器,控制框图如图3所示。
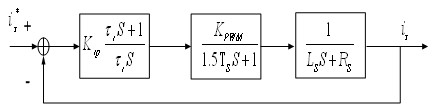
图3 电流内环控制器
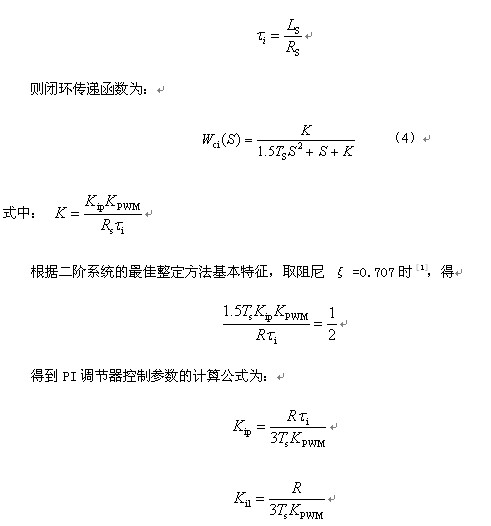
考虑到电流内环需要获得较快电流跟踪性能,设计PI调节器的零点抵消电流控制对象传递函数的极点,即
3.3.2电压外环的设计
假设直流端的滤波电容足够大,则可忽略直流电压纹波扰动,电压外环控制器如图4所示。
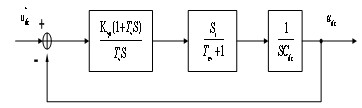
图4 电压外环控制器
得到电压外环的开环传递函数为:
4 仿真结果分析
根据仿真模型,利用数学工具MATLAB/Simulink对本文提出的直接电流控制四象限变流器进行验证。参数设计如下:
交流侧:网侧交流电压Us=1500V,频率fs=50HZ,线路电阻RS=0.2Ω,线路电感Ls=1.19mH;直流侧: 输出电压指令Ud=3000V,电容Cd=0.01F,二次滤波环节C2=3mF,电感L2=0.84mH;电流内环PI参数为:Kip=4.55,Kli=210,电压外环PI参数为:Kvp=0.5,Kvi=291。
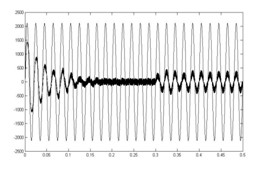
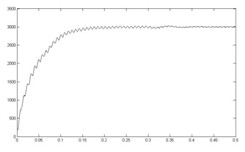
运用双闭环直接电流控制,启动过程的仿真结果如图5所示。从图中可以看出,双闭环直接电流控制启动电流波动比较小,动态响应速度快,在0.3s时加上负载后,输入电压和电流的功率因数为1,得到良好的效果。
(a) (b)
图5 软启动到加上负载时的仿真波形: (a) 输入电压和输入电流波形; (b)输出电压波形。
增大负载后的仿真波形如图6所示。在负载切换的过程中,输出直流电压跌落30V,波动比较小,网侧输入电压和输入电流在经过1个工频周期后保持同相位,稳定后变流器功率因数接近于1。
(a) (b)
图6 增大负载时的仿真波形:(a)输入电压和输入电流波形;(b)输出电压波形
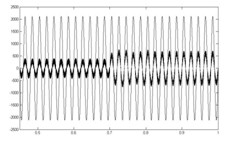
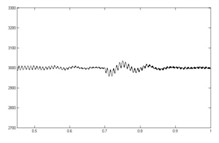
额定牵引负载到额定再生负载时的仿真波形如图7所示。在状态切换的过程中,输出直流电压限定为最大3200V,波动范围不超过5%,网侧输入电压和输入电流在经过3.5个工频周期后保持功率因数-1。
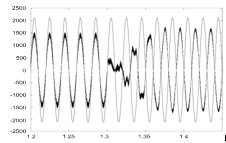
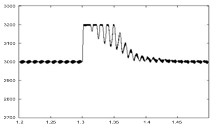
(a) (b)
图7 额定牵引负载到再生负载时的波形:(a) 输入电压和输入电流波形;(b) 输出电压波形
5 结语
本文分析了四象限变流器的工作原理,提出了四象限变流器的数学模型,建立了双闭环直接电流控制的仿真模型。通过仿真对四象限变流器系统的结构、系统的稳定性、系统的动静态响应以及系统的参数对系统的可靠性、稳定等性能的影响进行了研究。仿真结果表明,双闭环直接电流控制四象限变流器具有良好的动态响应和稳态特性。