
我们在图 9.38 中在 INA152 的等效 Zo 模型中添加 CL(CL=10nF)。
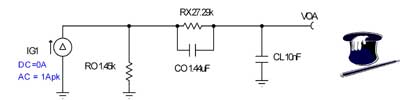
图 9.38:用于分析 fp2 的 TINA 电路
从图 9.39 我们可以看出模拟结果中 fp2 位于 11.01kHz,其非常接近我们预测的 10.98kHz,因此可以继续分析。

图 9.39:Zo 与 CL="10nF" 时的 fp2 图
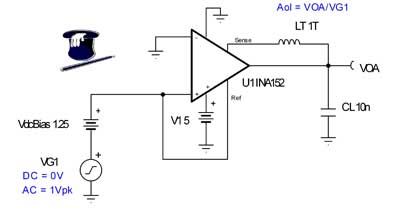
图 9.40:CL=10nF 时,Aol 修正曲线的 TINA 电路图
现在我们可以对 CL="10nF" 的实际 INA152 进行 TINA 模拟,并使用图 9.40 的电路将其与预测响应进行对比。
图 9.41 的 TINA 模拟结果显示了 INA152 运算放大器原始 Aol 在 3.4Hz (fp1) 时造成的低频极点以及 Zo 与 CL="10nF" 在 fp2=11.02kHz 时产生的第二个极点。请记住,我们曾经根据一阶分析预测fp2=10.9kHz,并根据 CL="10nF" 的等效 Zo 模型预测 fp2=11.01kHz。
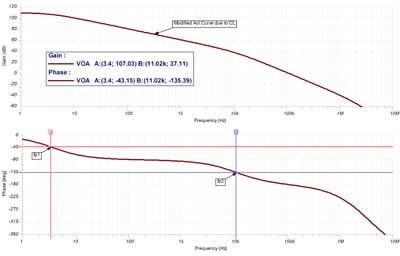
图 9.41:CL=10nF 的 Aol 修正曲线的TINA 图
补偿:CMOS RRO" border="0" height="257" hspace="0" src="http://files.chinaaet.com/images/20100811/ac422f80-db74-4955-97e5-7e7ef7ec4ee4.jpg" width="400" />
图 9.42:输出引脚补偿:CMOS RRO
我们在图 9.42 中确定用于 CMOS RRO 运算放大器的输出引脚补偿方法。此方法的图形与适用于双极性发射极跟随器运算放大器的输出引脚补偿方法的图形非常类似。我们首先利用由 Zo 与 CL 造成的极点 fp2 修正运算放大器的最初 Aol 曲线(见图 9.41)。一旦创建了该曲线(修正 Aol,CL=10nF),我们就可以绘制从 CL="10nF" 的Aol 修正曲线与 0dB 交叉点开始的第二条曲线(最终修正 Aol)。从上述起点我们按照每十倍频程 -20dB 的斜率画到比 CL="10nF" 的Aol修正曲线的 0dB 交点低一个十倍频程的点(100kHz)。我们在 fzc1 极点将斜率修改为每十倍频程为 –40dB。我们在 fpc2 极点与原始 INA152 Aol 曲线相交。通过使极点和零点相互保持在一个十倍频程内以保持环路增益相位在环路增益带宽范围不低于 45 度,这样上述建议的最终 Aol 修正曲线符合我们所有经验标准。另外,我们建议的最终Aol曲线修正还满足在 fcl 极点闭合速率为每十倍频程 20dB 的一阶稳定性标准。
图 9.43 详细说明基于 Zo 及 Slide 47 的预期最终Aol修正曲线的公式。此外,我们注意到在CCO 短路时由于 RCO 与 CL 相交造成的另一个高频极点。

图 9.43:输出引脚补偿公式:CMOS RRO
我们在图 9.44 中建立一个 TINA Spice 电路,用于证明可以预测 Zo、CCO、RCO 及 CL对 Aol 曲线所产生的影响的公式。
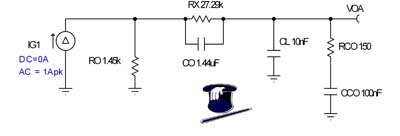
图9.44:预测 Zo、CCO、RCO与CL 造成的Aol修正影响的 TINA 电路
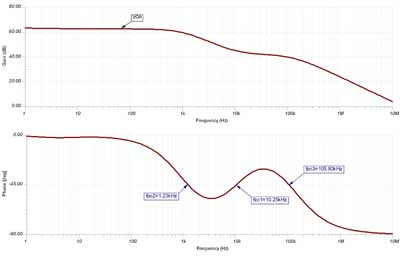
图 9.45:Zo、CCO、RCO 及 CL 造成的Aol 修正影响
我们从图 9.45 可以看出模拟结果,用于检查针对 Zo、CCO、RCO 与 CL的 Aol 修正公式。预测的 fpc2=1kHz,实际 fpc2=1.23kHz;预测的 fzc2=10kHz,实际 fzc2=10.25kHz;预测的fpc3=106kHz,实际 fpc3=105.80kHz。根据我们的等效 Zo 模型,我们的预测非常接近模拟结果。
根据图 9.43 的分析及相关模拟证明,我们可以创建如图 9.46 所示的最终 Aol 修正预测。最终闭环响应 Vout/Vin 预计为平直曲线,直到环路增益在 fcl 位置达到零点,此时预计其遵循所示的Aol修正曲线。
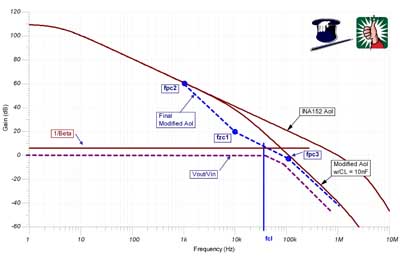
图 9.46:最终Aol 修正预测
图 9.47 为采用最终输出引脚补偿的 AC 稳定性测试电路。最终可以产生由于输出引脚补偿与CL造成的Aol 修正曲线。
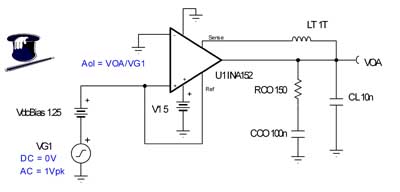
图 9.47:AC 稳定性电路:输出引脚补偿
图 9.48 说明采用输出引脚补偿方法的最终Aol 修正结果,其符合图 9.46 所示的一阶预测。
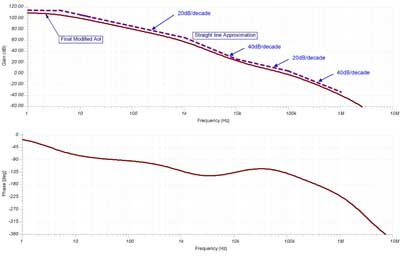
图 9.48:AC 稳定性图:输出引脚补偿
我们将采用图 9.49 的电路进行基于最终输出引脚补偿的瞬态稳定性测试。
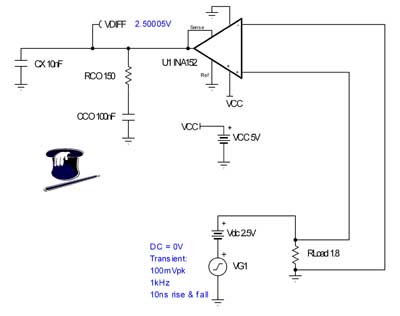
图 9.49:瞬态稳定性测试:输出引脚补偿
图 9.50 的瞬态稳定性测试结果证明我们确实已经正确地为用于 CMOS RRO 差动放大器的输出引脚补偿方法选择了合理的补偿值。

图 9.50:瞬态稳定性结果:输出引脚补偿
图 9.51 的 TINA 电路使我们能够确定图 9.46 中的预测 Vout/Vin转移函数是否正确。

图 9.51:Vout/Vin AC 响应电路:输出引脚补偿
我们可以从图 9.52 看出针对由输出引脚补偿方法补偿之后的 INA152 电路的 Vout/Vin AC 闭环响应。图 9.46 的对比说明我们的预测响应符合模拟结果,闭环响应图从稍高于 35kHz 之处开始倾斜。
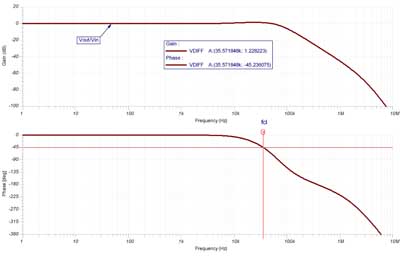
图 9.52:Vout/Vin AC 响应:输出引脚补偿
我们在图 9.53 中返回到最初的 CMOS RRO 应用并在 INA152 中增加输出引脚补偿,另外关闭整个环路,以便利用瞬态稳定性测试来检查稳定性。

图9.53:可编程电源:输出引脚补偿
图 9.54 表明,通过利用输出引脚补偿方法消除 INA152 输出的电容负载不稳定性,我们可以实现稳定的可编程电源。
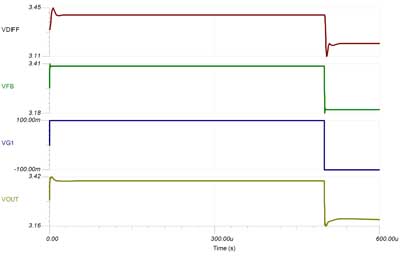
图9.54:可编程电源:基于输出引脚补偿的瞬态稳定性测试
钽电容器简介
在电容器值超过约 1uF 情况下,往往采用钽电容器,因为其具有较高的电容值及相对较小的尺寸。钽电容器并非纯粹的电容。它们还具有 ESR 或电阻元件及较低的寄生电感与阻抗(参见图 9.55)。除电容之外,它最重要的组件是 ESR。在采用输出引脚补偿方法实现稳定性时,应当确保 ESR 小于 RCO/10,以保证 RCO 是主导电阻,从而设定 Aol 修正曲线的零点。
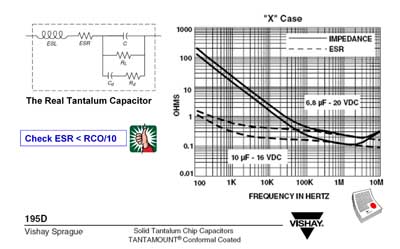
图 9.55:钽电容器与输出引脚补偿说明
关于作者:
Tim Green 于 1981 年毕业于亚利桑那大学 (University of Arizona) 并获得电子工程学士学位。他是一名杰出的模拟与混合信号板级/系统级设计工程师,拥有长达 24 年之久的丰富经验,其涉及的工作领域包括无刷马达控制、飞机喷气发动机控制、导弹系统、功率运算放大器、数据采集系统及 CCD 相机等。最近,Tim 还从事了有关模拟与混合信号半导体战略营销方面的工作。他现任亚利桑那州图森市TI公司的线性应用工程经理。