
采用GaN电机系统提高机器人应用的效率和功率密度
2023-02-20
来源:电子产品世界
机器人在各个市场都有着广泛应用,它们也呈现出多种形式,包括服务机器人、协作机器人(cobot)、工业机器人、自动驾驶无人机和自动引导车辆等。对于成功的机器人应用,一个关键考虑因素是确保最佳电机驱动设计。就硅基(Si)电机驱动器而言,在效率和尺寸之间必须做出某种权衡。例如,较高的开关频率允许使用较小的无源元件,但会导致较高的功耗。业内一些人士提出,可以使用氮化镓(GaN)高电子迁移率晶体管(HEMT)来代替硅器件以减轻这种权衡。本文将探讨基于GaN技术的电机驱动原型这一提议。
本文引用地址:http://www.eepw.com.cn/article/202302/443393.htm
GaN基电机驱动架构
图1所示,为一个采用两个100V、3mΩ CoolGaNTM SG HEMT半桥电路的100V GaN电机驱动器顶层框图。为了实现双面冷却,这些芯片在封装顶部配有一个裸露管芯。半桥具有非常低的回路电感(400pH),这允许在器件峰值漏极电压额定值内以不到1ns实现快速电压转换。

图1 基于CoolGaN™ SG HEMT 100 V的马达驱动图示
该设计中使用的1EDN7126G栅极驱动器是EiceDRIVER™ 产品系列的一员,这些驱动器专门设计用于GaN开关和逻辑电平MOSFET。为了提供开关速度方面的灵活性,可提供从0.5A(1EDN7146G)到2A(1EDN7116G)的不同源/汇(source/sink)电流强度。与使用单独栅极电阻器相比,这种方案降低了电路布局复杂性和回路电感。
一种被称为“真差分输入”(TDI)的特性能够保证快速开关瞬态期间的稳定运行,据此可实现低侧开关的极高抗接地反弹以及高侧的高共模电压抑制能力。因而,可以用同一驱动器驱动低侧和高侧HEMT。此外,1EDN71x6G系列在输出级还具有有源米勒钳位(Miller clamp),在栅极电压下降到0.4V以下的3ns内,可将下拉强度增加到5A。这在GaN HEMT的关断速率方面提供了设计自由度,同时保持了高抗感应导通能力。只有0.3Ω的下拉电阻意味着一旦驱动器锁定,即便在高速开关期间,栅极电压也保持在0V。
三个半桥电路包括单独的温度和同相(in-phase)电流传感器。为确保低外形设计,电路板的两侧还整合有与HEMT类似高度的100V陶瓷电容器。由于高开关频率可降低电容器纹波电流,因此不再需要使用大容量电解电容器。在100kHz及以上频率下运行时,80µF的总直流链路电容就已经足够。
为了向低侧栅极驱动器提供稳定的电源电压,该设计采用了48V到5V的降压DC/DC转换器,而高侧栅极驱动器则由1EDN71x6G EiceDRIVETM有源自举钳位功能供电。
为了优化高频功率环路电感,并充分利用CoolGaN HEMT提供的更快开关速度,可选择同相电流传感器而非传统的低侧电流测量。与差分电流放大器相比,隔离的同相电流传感器对电压瞬态具有更好的抗扰性。XENSIV™ TLI4971采用基于单片霍尔元件的无磁芯设计,具有高线性输出和可配置感测范围(从±25到±120A),从而能够满足这些要求。即便是最苛刻的磁场定向控制(FOC)应用也可以通过240kHz带宽应对。
XMC4400驱动卡能够为无传感器FOC提供控制回路,更新速率为20 kHz,最大开关频率为100kHz。通过将控制频率增加到与开关频率相同,可以在需要快速动态控制响应的应用中提供更高的控制带宽。
图2显示了电机驱动设计的俯视图、侧视图和仰视图。矩形区域(仅为56 mm x 40 mm,厚度为3.7mm)包括整个电机驱动器的所有部件,包括直流链路电容、电流传感器、辅助电源和方便的测试点。总溶液体积为8.3 cm³,这意味着该电机驱动器的功率密度为120 W/cm³或2 kW/in³,适用于需要1 kW功率处理能力的应用。
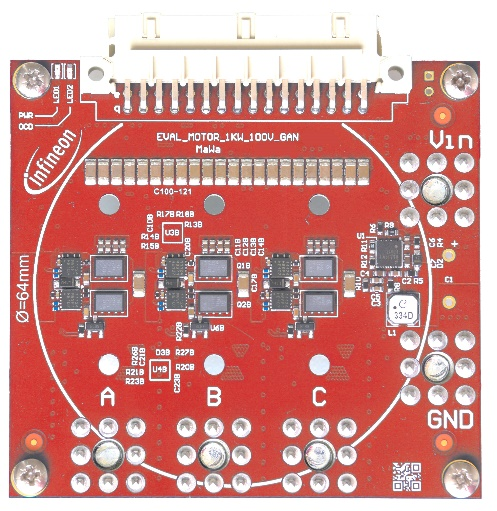
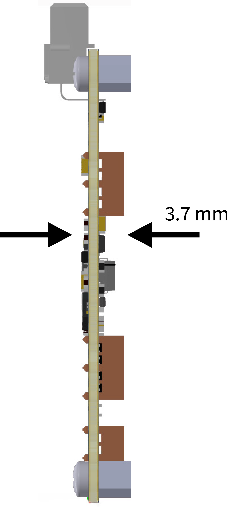
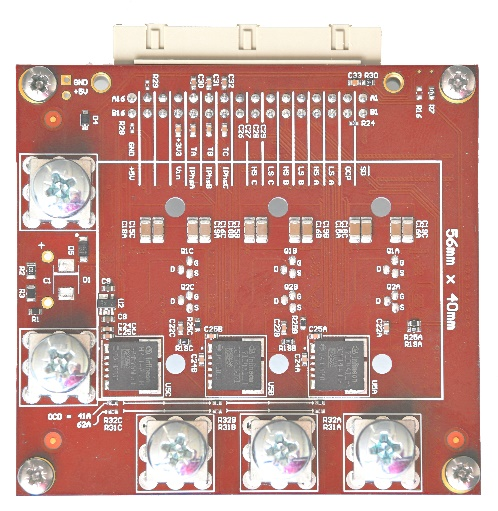
图2 CoolGaN™ 电机驱动器的俯视图、剖面图和侧视图
绕组绝缘损坏和轴承磨损是限制电机电压变化率的两个因素。对于48V电机,绕组绝缘通常不是一个重要问题,因为这些电机通常具有更高的电压绝缘额定值。然而,轴承磨损可能是一个较大问题,因此电机驱动器的开关速度有时会受到限制。此外,将驱动器连接到电机的电缆会显著影响电机的有效dV/dt,如图3所示。这里,电机的dV/dt大约比CoolGaN电机驱动器的dV/dc低一个数量级(4.9 vs.51 V/ns)。在确定轴承的寿命和可接受的dV/dt时,还必须考虑机械负载、标称转速(RPM)和温度等特定应用因素。
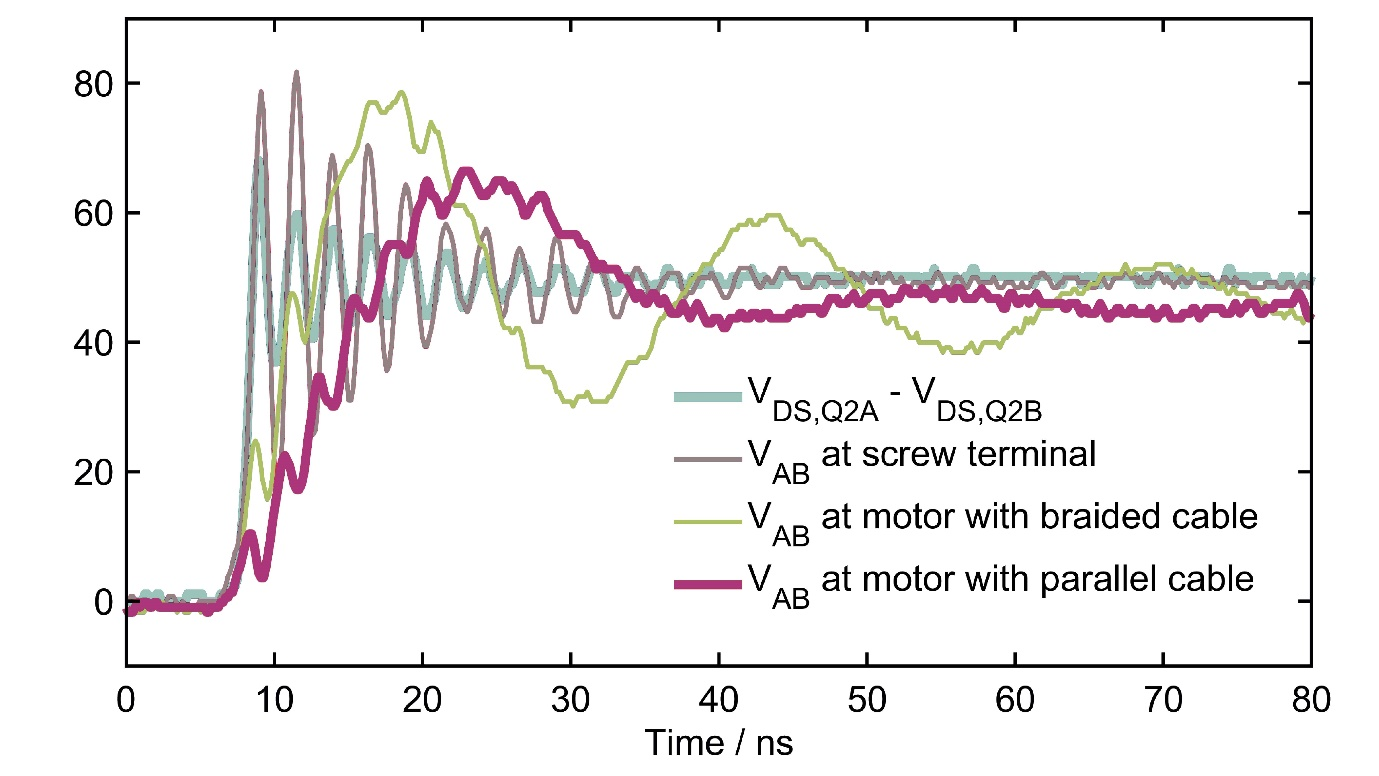
图3 直接在开关节点处的开关波形与紧密探测环(绿松石色)(位于螺钉端子处略微延伸探测环(灰色)),以及直接使用光学隔离差分探头(绿色和紫色)测量的两相之间电机端子处比较
较高开关频率可提高系统效率
CoolGaN的高开关速度™ 器件在选择开关频率时能够为设计师提供更多选择,允许他们检查端到端效率和总解决方案大小,而不仅仅是逆变器的效率。
结合市场商用的低电感(20µH相间)高极数(pole-count)(14P)无人机电机,基于CoolGaN™的电机驱动整体系统效率在20、60和100 kHz开关频率下分别进行了测量,使用测力计测量电机的机械输出功率,使用万用表测量逆变器的直流电输入功率。图4比较了20和100 kHz下100 W和500 W运行的相电流波形。这表明,更高的开关频率导致更低的电流纹波、更低的RMS电流和更少的散热。在100W时,RMS电流从5.6A降至4.5A(降低20%);在500W时,电流从26.2A降低到23.1A(降低12%)。
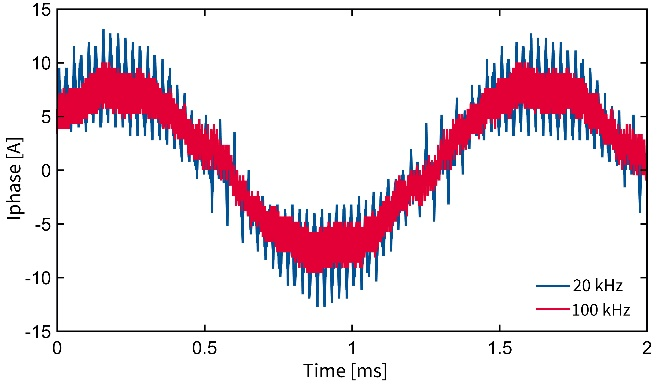
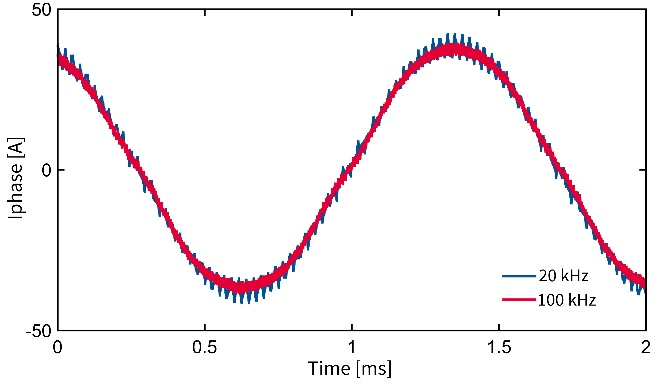
图4 100W(左)和500W(右)运行时的相电流波形
虽然在较高开关频率下RMS相电流的降低在轻负载下更为明显,但在整个负载范围内可以观察到对于绕组温度的益处。如图5所示,在500 W机械输出功率下,绕组温度从20 kHz时的110°C降至100 kHz时的约80°C。对于像协同机器人等需要限制散热的应用,这是一个重要的改进。

图5 20、60和100 kHz运行时的电机绕组温度
电机温度的降低是由于其中电流纹波减小,从而降低了绕组和铁芯损耗;然而,开关损耗与开关频率成正比,一般情况下会增大逆变器中的功率损耗和散热。对于传统的基于MOSFET或IGBT的设计,这将是一个负面的权衡。然而,如图6所示,由于CoolGaN™ HEMT极低的开关损耗,端到端效率随着开关频率的增大而提高。
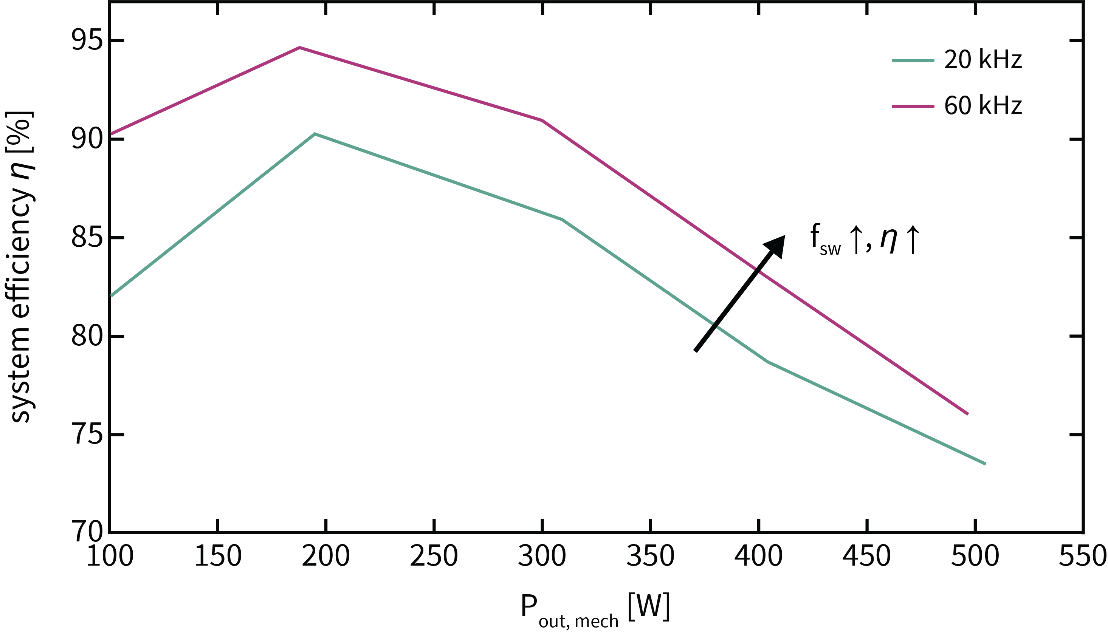
图6 20和60kHz频率下端到端效率
总结
本文介绍了使用GaN开关器件的无传感器FOC 48V应用电机驱动器设计,对设计的评估表明,GaN器件允许采用更高的开关频率,而不会降低系统效率或超过热管理极限。更高的开关频率可改进端到端系统效率,实现更低的电机温度和更高的功率密度。设计具备的小尺寸意味着电机驱动器可以嵌入在底座附近(例如,在机器人手臂内部),从而减少长电缆连接引起的EMI。
更多信息可以来这里获取==>>电子技术应用-AET<<
