
引言
图像型电子警察" title="电子警察">电子警察系统是目前交通监管的有效手段,其外部硬件设备通常包含4个部分:前端感应设备、控制器、抓拍摄像设备和后端传输设备。根据其前端感应设备的不同,图像型电子警察系统可细分为线圈型、雷达" title="雷达">雷达型和红外型等。其工作原理:前端感应设备根据特定的检测条件,发现到达(或离开)车辆,并发送感应信息到控制器,控制器判断是否满足抓拍条件,满足则启动相应的抓拍摄像设备(相机、摄像机等)进行抓拍,并将抓拍结果和感应信息通过后端传输设备上传至服务器。
图像型电子警察系统抓拍的图像质量是影响整体系统性能的最重要因素。而图像质量的关键问题在于成像装置的调焦,调焦将直接影响抓拍成像的质量。为获得较为清晰的图像,便于识别机动车,被抓拍的机动车必须处于电子警察系统的景深范围内。而从电子警察系统的前端感应设备检测到车辆,到启动抓拍设备拍摄这一过程是有延时的。延时不稳定或太大都会给图像抓拍带来困难。延时不稳定时,同样车速的车辆抓拍位置会出现较大偏差:而延时太大又会造成不同车速车辆的抓拍位置出现较大差异,成像系统难以实现清晰成像。因此测量和控制电子警察的抓拍延时" title="抓拍延时">抓拍延时是保证系统性能的有效手段。电子警察抓拍需经“感应→控制器→照相机(摄像机)”的过程,而其中每一环节都会带来延时。例如雷达型电子警察的抓拍延时主要包括:从违章车辆进入(或离开)探测区域到雷达输出速度信息的固定延迟;从控制器接收到速度数据到发送抓拍指令时数据处理产生的延时;从成像部分接收抓拍指令到抓拍的延时。其中雷达的数据输出延时可从设备参数中直接获得(一般约 10 ms);而控制器的数据处理延时和成像系统的延时通常无法直接获得,需要专门测量。由于出现延时的环节多,要求高测量精度,并且多个环节难以同步,应用现有设备测量这些延时具有一定难度。因此,这里提出了一种以雷达抓拍延时为对象的电子警察抓拍延时测量方法。
2 工作原理
在雷达型电子警察系统中,雷达通过串口(RS232或RS485总线)向控制器发送车辆的速度信息,无车辆时,雷达不发送数据或发送车速为0的数据;当雷达检测到车辆时.则发送速度值给控制器。电子警察控制器处理接收到的数据,按照一定算法确定控制成像部分是否抓拍。在实际运行中,为了避免和减少误触发,电子警察控制器通常采用一些特定的处理技术,从而产生系统延时。
图1给出雷达型电子警察抓拍延时测量原理图。其中计时显示器为专门设计的电子装置,它能够从接收到触发信号开始以毫秒为单位计时显示。

实际测量雷达型电子警察抓拍延时按如下步骤进行:①计时显示器置于电子警察系统的摄像机拍摄范围内;②将雷达的检测数据同步发送给计时显示器;③设定计时显示器的触发电路,在接收到雷达第一个有效数据时,启动时间显示器,开始计时;④电子警察系统接收到雷达检测数据后,按照其工作流程抓拍,其抓拍的图像包含计时显示器所显示的时间图像;⑤从抓拍图像中读取时间数值,将该数值再加上雷达输出延时就是电子警察系统整体的抓拍延时时间。
该测量方法的关键是计时显示器的设计.不同接口的触发器和不同触发规则的设定,分别适应不同类型的电子警察系统(如线圈型、雷达型等)和抓拍方式(如车头抓拍、车尾抓拍等),以下针对雷达型电子警察,详细介绍适用于车头抓拍和车尾抓拍的计时显示器设计。
3 计时显示器设计
3.1 硬件电路设计
图 2给出计时显示器的硬件设计原理电路。其中包括:①主控器件(ATl):采用应用比较广泛的AT89S5l单片机,它是整个计时显示器的核心,用于读取串口数据,触发判断并控制计时电路;②晶体振荡器(X1):12 MHz的有源晶体振荡器(1个机器周期包括12个时钟周期,因此1个机器周期为lμs,能较准确产生1 ms的定时中断);③锁存器(Ul、U2、U3):采用74LS573,也可用74LS373,由于用摄像机拍摄显示结果,因此显示数据必须锁定,而单片机AT89S51的I/O端口有限,采用锁存器扩展并行输出,如需要扩展3个并行输出端口,则需要3个选能信号(P2.0、P2.1、P2.2);④数码管(DSl、DS2、DS3):7段共阳极数码管用于显示计时时间。由于要测量的延时约为几百毫秒,使用3个数码管就能满足系统要求;⑤串行接口 (MAX232):由于RS232信号的电平逻辑与单片机的串行端口的电平逻辑不一致,因此需要电平转换。该系统采用MAX232器件。
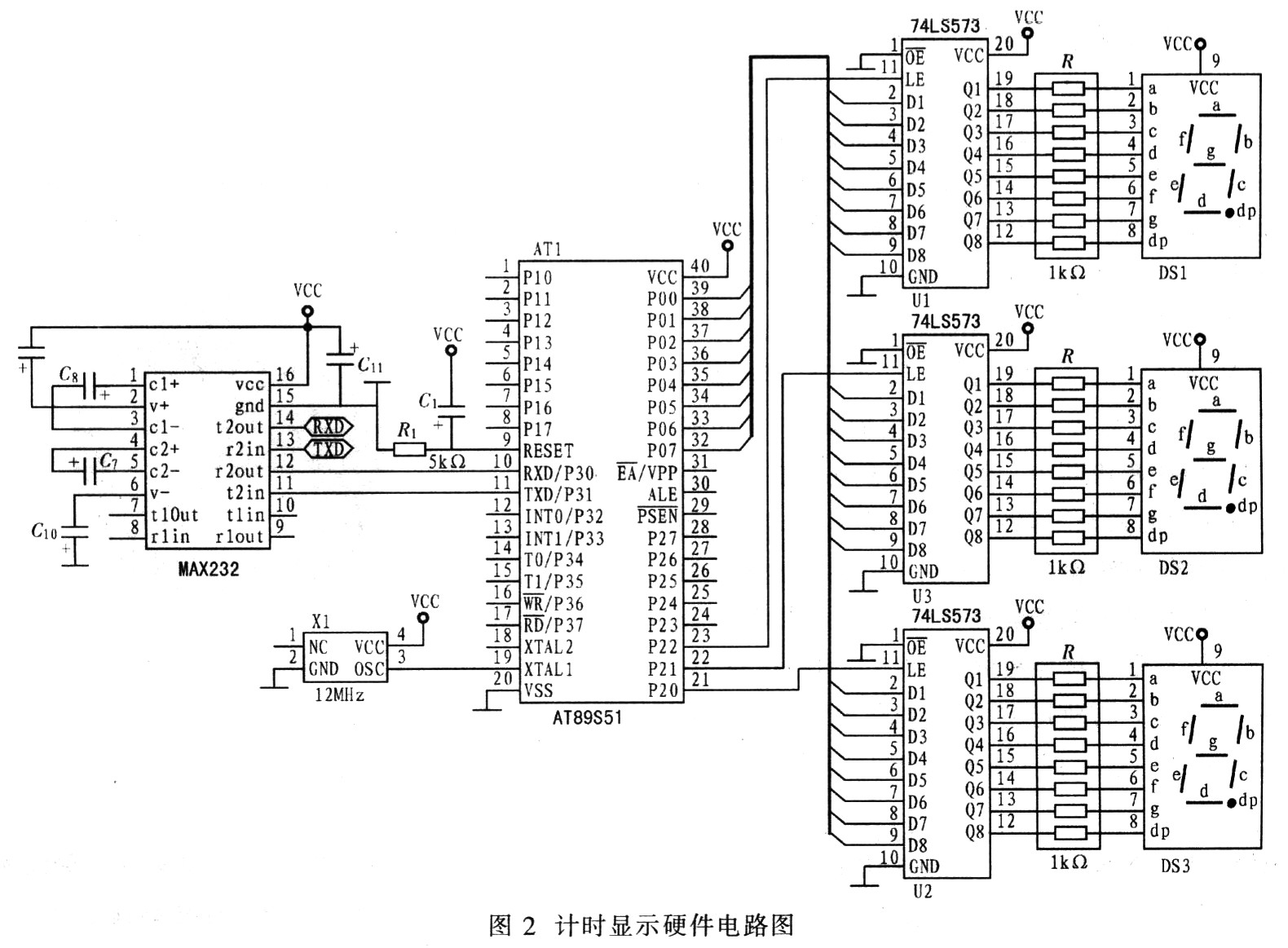
单片机AT89S51的P0端口作为数据位与锁存器相连,单片机串口经MAX232器件转换后(图2中的RXlD、TXD)接入电子警察系统(雷达的串口)。
3.2 软件程序设计
软件设计主要包括触发判断和计时显示两部分。
3.2.1 触发判断
判断何时启动计时电路开始计时。单片机串口通过缓冲器SBUF接收雷达的速度数据,接收一个比特数据,清除RI标志位,然后再接收下一个数据。抓拍方式不同(车头或车尾抓拍),则触发的条件也不同,触发判断如见表l所示。

采用车尾抓拍时,由于触发判断时加入了延时,计时电路从10开始计时。
3.2.2 计时显示
以毫秒为单位进行计时和显示控制,关键是配合拍摄需求的静态显示控制,即3位数字同时点亮。具体过程是:设定单片机定时器初值使其产生1 ms定时中断,1ms定时时间到则相应位计数加1,选通相应使能位(个位对应P2.0,十位对应P2.1,百位对应P2.2),通过查表将相应的数字转换为显示码,当计时时间达到999 ms时停止计时显示。图3给出个位的计时显示控制程序流程。

图3 个位的计时显示控制程序流程
注意:数码管的时间显示间隔应与摄像机的拍摄速度相匹配,即要求曝光时间小于时间分辨率。如为了获得1 ms的延时测量分辨率,应将电子警察的快门速度控制在1/l 000 s以下;若快门速度为1/500 s,时间分辨率只能达到2 ms。若两者不匹配,曝光时间大于时间分辨率,则导致时间显示重叠,无法读取正确的时间数值。
4 实验结果
将该计时显示器应用于雷达型电子警察系统,采用具有外触发功能的摄像机抓拍,进行延时测试,分别测量车头抓拍和车尾抓拍的延时,每组测量50个数据。实际测量中,该电子警察系统在车头抓拍时最大延时12 ms,最小延时6 ms,延时非常小,且延迟量稳定。在实验测量车尾抓拍延时时(控制器判断车辆离开的延迟设为500 ms)发现延迟最大值为757 ms,最小值为748 ms,虽然延时较为稳定,但总延迟时间较长。在车速高的区域基本不能使用。
5 结语
结果说明,该计时显示器设计的测量方法能方便有效地测量雷达型电子警察系统的抓拍延时。针对不同视频的抓拍系统,只需更改相应的计时显示器输入端触发方式,即可实现延时测量。因此,该方法具有较好的适应性,扩展性及参考价值。