
三相异步电动机具有结构简单、价格低廉、维护方便、运行可靠等许多优点,因而获得了广泛应用。但在采用较简单的方法调速时,性能远不如直流电动机。随着科学技术的发展,特别是半导体制造技术的长足进步,以变频调速和串级调速为代表的复杂调速技术控制电路因性能不断提升、成本不断下降而获得了广泛的应用。
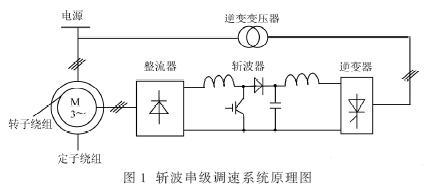
绕线式异步电动机多采用串级调速方法, 由于这种调速方法可以将串入附加电动势而增加的转差功率回馈到电网或电动机轴上,克服了以往转子回路需要串电阻的缺点,提高了调速的经济性,具有节能作用,可以使系统获得较高的运行效率。图1是斩波串级调速原理图,它在转子直流回路中加入了直流斩波器,通过调节斩波器的占空比实现电机转子转速的无级调速。斩波串级调速技术具有独特的优势,特别在高压大中型电动机节能应用方面前景光明。
对于串级调速系统中逆变控制器多采用SPWM控制技术,而SVPWM控制技术是一种优化了的PWM控制技术,和传统的SPWM相比,SVPWM 具有直流利用率高(比传统的SPWM提高了约15%)、谐波少、控制简单、易于实现数字化等优点。而且电压空间矢量的不同调制方法在不同程度上可以缓解开关频率与开关损耗之间的矛盾。正是由于SVPWM控制技术的这些优点,使得本课题的研究具有重要的意义。
1 SVPWM脉宽调制原理及实现
1.1 SVPWM基本原理
空间电压矢量脉宽调制(SVPWM)是以三相对称正弦波电压供电时交流电动机产生的理想圆形磁链轨迹为基准,用逆变器不同的开关模式产生的实际磁通去逼近基准磁链圆,并由他们比较的结果决定逆变器的开关状态,形成PWM波形,从而达到较高的控制性能[1]。根据三相逆变器的工作原理可以知道,逆变桥共有23=8种状态,若将逆变器的8种状态用电压空间矢量来表示,则形成8个基本的电压空间矢量,其中6个非零矢量,2个零矢量,每两个电压矢量在空间相隔60°,如图1所示。SVPWM技术的目的是通过与基本的空间矢量对应的开关状态的组合,得到一个等效的空间旋转电压矢量Vref(通常称为参考电压矢量,其理想轨迹是一个圆)。图2中所示六边形内切圆表示SVPWM欠调制方式下参考电压的极限值[2]。
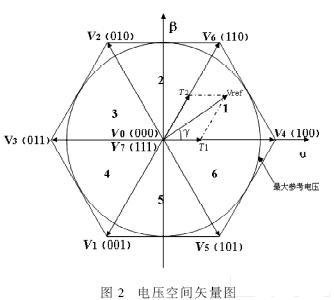
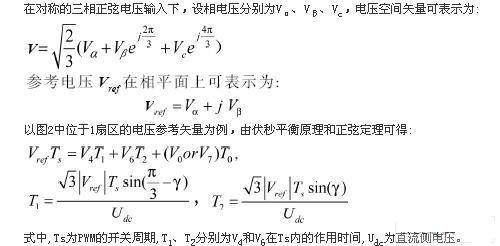
同样,可根据参考电压矢量的幅值和相角求取其他扇区的任一基本矢量的作用时间。在参考电压矢量作用下,可以获得幅值近似恒定、顶点沿圆形轨迹运动、平均速度可调的矢量。通过调控Vref的频率、幅值和相位,即可实现逆变器输出电压频率、幅值和相位的控制。
1.2 SVPWM算法
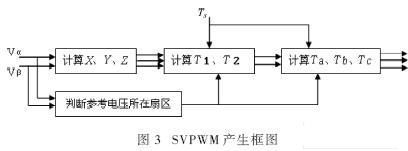
SVPWM算法实质是通过控制逆变器不同的开关模式,使逆变器瞬时输出的三相脉冲电压构成的电压空间矢量与所期望输出的三相对称正弦波电压构成的电压空间矢量相等效。SVPWM信号的实时调制需要参考电压矢量的二维静止坐标系α轴和β轴的分量、以及PWM周期Ts作为输入,其产生框图如图3所示。

1.3 SVPWM的实现
MATLAB/Simulink为了让用户能够迅速创建所需要的系统模型,提供了用以实现各种基本功能的大量标准模块,并根据其功能的不同将它们归类在不同的模块库中。利用这些模块库可以实现前面所分析的SVPWM算法。
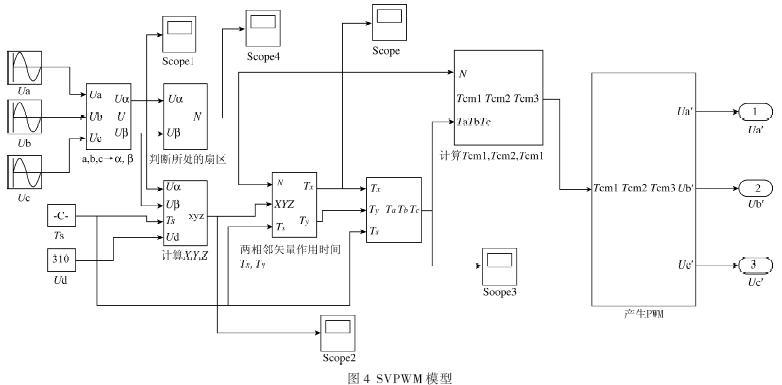
SVPWM的模型框图如图4所示。其中包括扇区判断、X, Y, Z的计算、T1,T2的计算、Tcm1,Tcm2,Tcm3的计算以及SVPWM产生等子模块.
2 串级调速系统仿真模型的建立
由图1可见,斩波串级调速系统的主电路由三相对称交流电压源、三相绕线式异步电动机、整流桥、平波电抗器、斩波单元、逆变器、逆变变压器等部分组成。为了研究和分析SVPWM算法在串级调速系统中应用的可行性,利用MATLAB/SIMULINK中的powersystem和Simulink模块库,为此系统建立了仿真模型, 由电机测量模块可以直接检测出电机的各输出物理量。仿真结果如图5所示。

本文根据空间电压矢量PWM技术的基本原理,对SVPWM算法进行了详细阐述,并用MATLAB7.1的SIMULINK对SVPWM算法进行了仿真,得到较为理想的结果,最后建立了基于SVPWM算法的串级调速系统仿真模型,结果表明该算法在串级调速系统中的可行性,为优化串级调速系统的数字化设计打下了良好的基础。