
O 引言
雷达侦察设备由于要对从几百兆赫至几十吉赫的频段进行侦察接收,为了保证天线的电气特性,同时便于跟踪不同波段的多个目标,往往采用多部天线。以往对天线的控制多采用相互独立的方式,每一部天线有对应的一套控制系统,其结果不仅是设备量大,故障率高,而且操作起来也不方便。为了简化对多部天线的控制,可以利用CAN总线的优势。CAN(Controller Area Network)总线为多主总线,具有点对点,一点对多点通信的功能,它采用非破坏性总线仲裁技术,可以根据总线上不同节点的优先级高(低)安排数据的传输次序,节省了总线仲裁时间,通信距离最远可达10 km(5 Kb/s),通讯速率最高可达1 Mb/s(40 m)。此外,CAN协议能够对通信数据进行编码,使得网络内的实际节点数可达100个以上。某雷达侦察设备中共有六部天线,对应于六个不同的波段,每部天线作为一个节点,操作台作为上位节点,通过设计灵活地控制软件,完成对各天线扫描方式、扫描速度及扫描范围的设定及PID控制。
1 CAN总线多夫线控制系统的组成
多天线控制系统由本地控制组件、CAN总线和天线控制器组成,如图1所示。其中本地控制组件包括本控面板、电源、微处理器和电机驱动电路,负责天线的位置信息采集和电机控制算法的实现;CAN总线采用CAN 2.0B标准协议进行数据传输,接口芯片采用SJA1000,完成物理链路层和数据链路层两层功能;天线控制器包括显示面板、控制按键、手轮、微处理器等,用于接收用户操作指令,显示指定天线的状态和控制天线的运动方式。
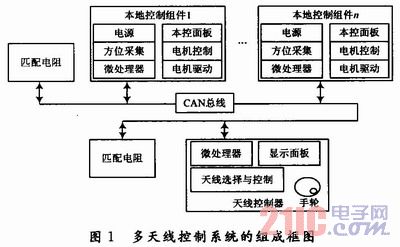
在由CAN总线构成的天线控制系统中,天线控制器和本地控制组件各分配一个固定的CAN网络地址,天线控制器通过面板选择所要控制的天线编号,将该天线的工作方式(扇扫、环扫、手动)、工作参数(扇扫边界、扫描速度)等发送到所选天线的本地控制组件,再由本地控制组件根据天线控制器给出的控制算法,实现对天线的控制,并将天线的当前参数(方位、转速、转向)通过CAN总线传送到天线控制器上显示。手动方式时,所选天线的本地控制组件根据天线控制器手轮的控制信息和跟随算法,实现对天线的手动位置控制。
2 方位传感器的数字化设计
在对天线位置信息的采集中,方位传感器采用同步机电路实现。其中,定子线圈加入工频激磁电压,转子的三相电压幅度受定子与转子相对角度的调制,三个转子线圈之间相互间隔120°放置。在模拟信号传输中,同步接收机会根据三相电压幅度的变化跟随同步机做同步旋转,达到传输角度信号之目的。为了便于与微处理器的连接,输出的方位信号还必须做数字化处理。
设同步机定子加激磁电压Vo=Vmsinωt,三个转子线圈的电压方程为:
式中:K为转子绕组与定子绕组的变压比;θ为转子相对于定子的转角;ω为工频激磁电压的角频率。
由此可知,在激磁电压正峰值时,对三个电压取值,则V1,V2,V3与转角θ的关系为:
将转角θ从0~360°划分为12个区间,每个区间30°,则可将同步机三相电压幅度随转子角度变化的曲线绘制如图2所示。
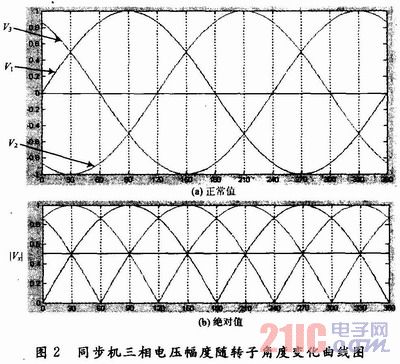
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中绝对值最小的信号Vx的极性来表示这12个区间,则很容易得到各区间的二进制代码,如表1所示。例如:当θ角在0~30°时,V1-V2为正,V2-V3为负,V3-V1为正,而此时V1的绝对值最小,即Vx=V1,其值为正,则该区间可以用(10 11)B表示。
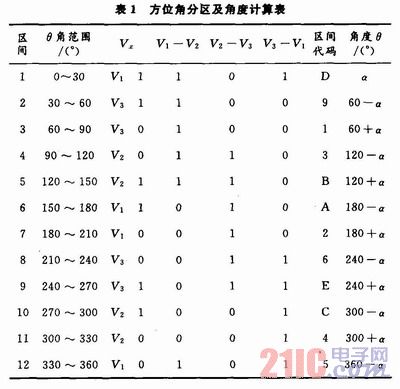
进一步,对此时的Vx信号做归一化处理后再进行反正弦运算,其结果是单调的,且计算出的角度值α介于0~30°之间。根据θ角所在的区间,就可求出当前天线的方位。
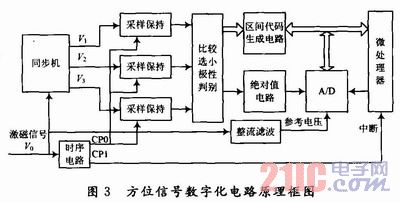
根据以上分析,可以将方位信号数字化过程简述如下:在激磁工频信号的正峰值点生成采样脉冲信号CP0和微处理器中断信号CP1,控制三路采样保持电路同时对分压后的同步机三相电压进行采样保持,选择绝对值最小的一路信号送A/D转换器,同时判断其正负;区间代码生成电路根据对三路采样信号的比较和最小信号的正负,确定θ角所处区间的代码;微处理器响应中断,启动A/D转换,求得α值,同时读取θ角所处区间代码,根据表1给出的区间计算公式,确定θ角的具体数值送本地面板显示,并通过CAN总线上传天线控制器。
方位数字化电路原理框图如图3所示。
从图2可以看出,在0~30°区间内正弦曲线可近似为线性区间,为进一步提高精度,可以按照正弦函数曲线对A/D转换进行补偿,以满足精确测量的需要。同时,为避免因激磁电压的波动引起A/D转换后的数值在区间之间的跳动,A/D转换器的参考电压应与激磁电压的幅度按比例浮动。
3 位置随动旋转编码器接口设计
旋转编码器是随动控制中常用的接口部件,这里选用增量式旋转编码器,它由涂有莫尔条纹的编码盘和光电检测装置构成,编码盘上涂有两道相差90°的黑白相间隔栅,分别称之为A道和B道。工作时,光电检测器发出可见光照射在编码盘上,当编码盘旋转时,光发射管装置照过隔栅,光敏接收管便会产生通(断)的脉冲输出信号。由于A,B道相位差为90°,因此其输出脉冲也有90°的相差。当旋转编码器正转时,A信号超前B信号90°;反转时,B信号超前A信号90°。
如果直接采样A、B两路信号,电路结构会比较复杂。为便于计算机处理,可将旋转编码器的A、B两路信号进行适当变换,生成方向信号DIR和增量计数脉冲CLK。图4给出了旋转编码器的接口电路以及相应的波形。为防止因机械转动带来的波形边缘的抖动,接口电路的输入应采用施密特型。
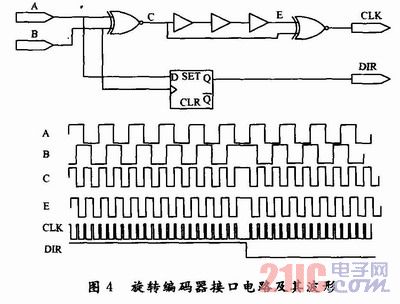
图4中C点的方波周期是A或B信号周期的1/2。为了在手轮低速转动时,防止由于A或B信号周期过大而影响计数器的正常工作,可将C点波形与经缓存器延迟后的波形E相异或,从而得到增量计数脉冲CLK,其周期应是C周期的1/2,即为A或B信号周期的1/4,实现A或B信号频率的四倍频细分。为便于计算机识别手轮的转动方向,电路中增加了方向信号DIR,当旋转编码器正向转动时,A信号超前B信号90°,此时DIR输出为高电平;反之,DIR输出为低电平。
4 天线的PID控制
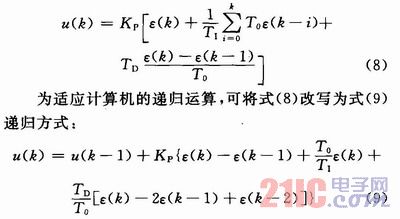
图5给出了天线的PID控制原理。如图5(a)所示,在连续控制系统中,PID的控制规律可以写成如下形式:

式中:u(t)为PID控制器的输出或称为被控对象的控制输入;ε(t)为偏差;Kp为比例系数;TI为积分时间常数;TD为微分时间常数。
为在数字系统中实现PID控制,需将连续PID控制规律离散成离散型PID控制规律,即用差分方程来表示:
天线的离散型PID控制方案如图5(b)所示。在该方案中,天线的工作方式分为自动扫描和手动扫描两种。自动扫描方式下,天线控制器选择设定相应天线的扫描转速。由于不同波段的天线尺寸不同,各个天线转台的转动惯量也不尽相同,因此需要通过调整相应天线的比例积分和微分常数,来使天线的控制达到期望的特性。而在手动扫描时,天线控制器将手轮的转动控制,经位置随动旋转编码器变换为对天线的控制输出,通过CAN总线实时传递给指定天线的本地控制组件,由本地控制组件中的PID控制算法实现对天线的手动控制,从而达到手动跟踪目标之目的。
5 结语
CAN总线技术已在工业控制中得到广泛应用。本系统采用CAN总线,结合天线方位的数字化接口设计,将分布式微处理器联系起来,实现了多天线的数字化PID控制,简化了天线控制系统的设计,保证了天线控制的精度与稳定性。