
摘 要:软 PLC是一种基于PC机的新的自动控制技术,与传统的PLC控制方式相比,它不仅能够实现硬PLC的所有功能,而且它遵循IEC61131-3编程标准, 为用户提供了更多的开放性,本文通过介绍使用德国3S公司的软PLC产品CoDeSys在注塑机控制系统设计中的应用,为传统控制系统的改造提供一种全新的控制方案。
关键词:软PLC;注塑机;控制系统
Abstract: Soft PLC is a new technology in the world industrial automation field ,It is based on the PC,Contrast to the traditional hardware PLC control system ,It provide more open opportunity to the customers.This paper based on new automation software CoDeSys ,and illustrate an example in the Plastic Injection Molding Machine to introduces the new control mothod to replace the traditional control system and realize the auto-control.
Key words: SoftPLC,Plastic Injection Molding Machine,Control System
1 前言
注塑机是目前广泛应用的高分子材料加工机械,目前在国内大量使用的注塑机基本上是采用机械或液压驱动的,控制系统大多采用触点继电器逻辑控制电路,这种控制系统的最大的弊端是控制系统自动化程度不高、精度较低、生产效率较低。采用硬件PLC的控制系统虽然能够实现各种控制功能,由于每个厂家的硬件专有性,封闭性使的用户升级和改造困难。随着自动化和计算机技术的发展,利用计算机的软硬件资源,通过软件可以实现硬件PLC的功能,并能实现精确的电子齿轮和电子凸轮的高精度同步运动控制,即软件PLC技术。它遵循IEC61131-3的国际标准。
采用软PLC的典型的系统结构是工控机加I/O接口加软PLC软件包。软PLC产品是基于PC机开放结构的控制装置,它具有硬PLC在功能、可靠性、速度、故障查找等方面的特点,利用软件技术可将标准的工业PC转化成全功能的PLC过程控制器。软PLC综合了计算机和PLC的开关量控制、模拟量控制、数学运算、数值处理、通信网络等功能,通过一个多任务控制内核,提供了强大的指令集、快速而准确的扫描周期、可靠的操作和可连接各种I/O系统及网络的开放式结构。通过采用软PLC和高精度控制性能的伺服电机作为驱动系统的全电动注塑机能极大的提高设备的易操作性,产品的质量和生产效率。
2 全电动注塑机结构及工作原理
2.1全电动注塑机的结构
全电动注塑机主要由注射装置、合模装置和电气控制系统组成。如图1所示,和通用的注射机相比,采用了高精度控制性能的伺服电机和滚珠丝杠实现圆周运动到直线运动的转换。注射装置的作用是将塑料均匀地塑化,并注射到模具型腔中。注射装置由塑化部件(螺杆,料筒,加热装置,喷嘴),料斗、计量装置、传动装置、注射电机及基座电机等组成。合模装置实现模具的开闭,在注射时应保证模具可靠地合紧。合模装置主要由前后固定模板,移动模板,连接拉杆,连杆机构,调模装置,合模伺服电机,脱模伺服电机组成。电气控制系统提供动力并使注射机按预定的工艺过程要求(压力,速度,时间,温度)和动作顺序工作。
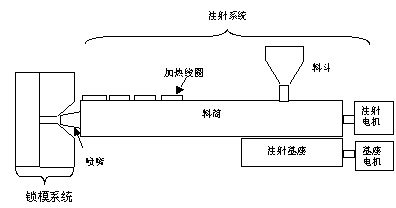
图1 注塑机系统组成示意图
2.2 工作原理
注塑机生产一件产品的过程一般要经过合模、注射、保压、冷却(塑化)、开模、顶出制品工序
操作方式:
(1)手动操作 利用手动操作可以进行单步的调试,包括手动设置开合模,手动模高调整,螺杆的手动操作,注射座的前后移动的手动调节等。
(2)半自动操作 按下半自动操作按钮,注塑机开始合模、注射等工作,直到产品加工完成,然后处于等待状态,当再次按下半自动操作按钮时,将开始下一次循环。
(3)自动操作 完成一个注射和计量周期后,程序自动进入下一个循环周期。
3 系统设计
全电动注塑机控制系统设计中需要解决三大问题:一是采用了伺服电机后如何保证高精度的运动控制,如何在程序中实现位置控制、速度控制、力矩控制以及这几种控制之间进行切换的问题。二是如何实现温度、压力模拟量的精确控制,来确保每个注射周期都能保证塑胶原料充分加热至合适的温度和确保注射压力、保压压力的精确控制。三是如何设计人机界面来实时状态的监控、在线数据的修改、出错报警的处理、对错误进行及时的诊断及消除。
3.1 系统的硬件设计
控制系统的硬件由工控机、SERCOS IO模块、博士力士乐公司数字伺服驱动器以及伺服电动机组成,控制系统的结构示意图如图2:工控机作为上位机构成控制系统的核心,通过软PLC和SERCOS光缆环控制锁模伺服电机、注射伺服电机、塑化伺服电机、脱模伺服电机按照编写的程序运动,可以实现注塑过程中高精度的运动控制,以及位置、速度、力矩以及这几种控制之间切换的问题。输入按钮、行程开关等外部数字量输入信号通过IO模块采集到PLC程序中,经过程序处理变成逻辑关系,得到所需要的输出状态来控制现场设备,指示灯和报警灯显示当前设备运行状况和错误报警信息。温度传感器、压力传感器模拟量信号通过SERCOS IO模块转换为软PLC可以识别的数字量信号,通过在编程系统中编写的PID模块程序可以实现注塑过程中的精确温度和压力PID调节。
SERCOS运动控制总线符合开放式数控系统的标准,可以根据系统需要灵活添加设备,有利于智能数控设备的集散控制,节省了设计和调试周期,同时使系统的可靠性大大提高。
3.2系统的软件设计
3S公司的CoDeSys与其它软PLC产品如SIEMENSE公司的SIMATIC WinAC、SOFTPLC公司的SoftPLC等相比。最大优点在于它集成了逻辑控制、运动控制和可视化于一体。
CoDeSys是符合IEC61131-3标准的编程工具。只要在计算机上安装了CoDeSys SP RTE软件,就可以成为一台先进的高性能可编程控制器(PLC),另外用CoDeSys不需要其它的组态软件就可以轻松实现实现可视化。可以用CoDeSys SoftMotion实现运动控制编程,包括单轴运动到复杂的多轴插补运动。
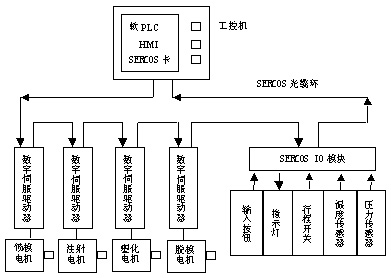
图2 控制系统结构示意图
本控制系统的程序设计采用模块化的设计方法,包括了运动主程序、手动控制程序、半自动控制程序、自动控制程序、IO控制程序、温度控制程序的设计
(1)任务设置
在程序任务中设置四个任务 MotionTask 、TEMPCTRL、PressureRead、IOTask
如图3所示:四个程序任务是并行的,根据设置的优先级和周期扫描的时间,这样就能保证逻辑控制和运动控制的不互相干扰。
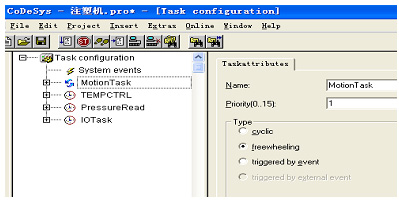
图3 任务配置图
(2)运动主程序设计
运动主程序中主要由参数初始化、轴组上使能、电机回零位、操作模式选择、轴组状态处理模块组成,在操作模式选择下,选择相应的操作模式(手动、半自动、自动),主程序将调用相应的处理程序(手动控制程序、半自动控制程序、自动控制程序)程序模块简图如图4所示:
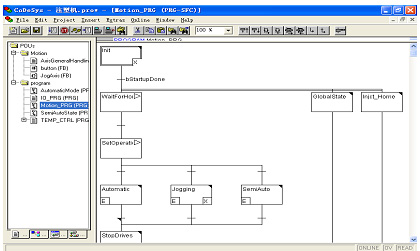
图4 程序模块简图
4 结束语
本文作者创新点为该控制系统的设计采用了软PLC技术和SERCOS运动控制总线技术,简化了硬件结构,使得开发的控制系统符合开发式体系结构的要求,系统的可扩展性、可靠性、可维护性大大提高,最重要的是实现了注射的高速高精度以及短周期循环。经过实践检验,本控制方案达到了预期的效果,具有十分广阔的应用前景。
参考文献:
[1] 付应红,李晓帆等.软PLC(SoftPLC)技术、产品及控制方案探讨[J].微计算机信息 2000,5
[2]胡燕海等.注塑机主体结构模块化设计及其实例研究.机械设计与研究,2004,6
[3]陈卫福,杨建武.开放式数控系统及SERCOS接口技术应用.机械工业出版社,2003.1
[4]CoDeSys User Manual