
摘要:近代雷达多通道接收机采用机械电位器进行通道间幅度校准,机械电位器不能在舰栽机的湿热及高震动条件下稳定可靠的工作,为避免这一缺点,拟采用数字电位器替代机械电位器。在分析了现有机械电位器应用电路的基础上,提取出数字电位器性能指标要求,然后使用数字电位器模型进行了分析、仿真。最后选用X9312进行了常温试验和高低温试验,实验结果表明数字电位器可以替代机械电位器进行多通道接收机幅度较准,从而使改进后的多通道接收机适用于舰载机的工作环境。
关键词:数字电位器;机械电位器;雷达多通道接收机;X9312
雷达多通道接收机要求各通道在输入同一信号时,输出信号幅度差控制在一定的范围内。多通道接收机会用一个可调环节来保证通道增益的一致性。某种雷达接收机通过调整机械电位器来调整放大器的增益,从而保证通道一致性。但是机械电位器不适用工作于舰载机的高湿热及震动条件下,所以本文讨论用数字电位器替代机械电位器的可行性及要求。
1 机械电位器与数字电位器优缺点
机械电位器是无源器件,阻值连续可调,连接使用方便。但有以下缺点:不容易从雷达接收机外部调节;抗震性能不好;端子有机械磨损,时间久了阻值会变化。生产过程中其调整次数有限;调整周期长;调整端子需要涂覆固定。工作于舰载机等高湿热、震动条件时,机械电位器环境适应性差问题突出。
数字电位器为采用集成电路工艺制成的三端可变电阻器件,具有以下优点:无滑片磨损;重复性好,密封性好,不易受污染,防潮湿,抗震动,抗冲击。生产时容易与单片机或计算机接口,可从分组件外自动调节。调整后的电阻值基本不受温度、湿度、压力等环境因素的影响,使用寿命长,能提高系统的可靠性。以上特性为其工艺本身所特有的优点,所以只要其电性能可以替代机械电位器,就可以提高电路的环境适应性。
2 现有机械电位器电路分析
为保证选用数字电位器后对目前电路兼容,先对现有机械电位器工作电路进行分析。
机械电位器应用于可调增益放大器的原理如图1所示。图1中V_ADJ是可调增益放大器的增益调整端,改变V_ADJ电压可调整通道的增益,R1为2 kΩ可调电阻,R2为固定电阻,调整R1的阻值间接改变了放大器的增益。实测的放大器V_ADJ电压与输出增益之间的关系如表1所示。

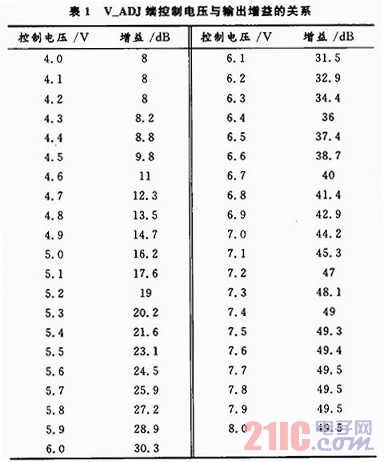
由此绘制的控制电压与增益之间的曲线如图2所示。

分析其中的线性增益部分,可得以下结论:调整机械电位器实际改变了控制端的电压,该电压在4.4~7.4 V范围内每增加0.1 V,输出增益增加约1.38 dB。该指标是数字电位器的选型基础。
3 数字电位器基本原理
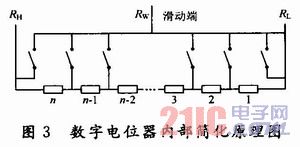
数字电位器内部简化原理如图3所示。将n只结构相同的电阻串联在RH,RL之间,每只电阻的两端分别经过一个由CMOS管或者NMOS管构成的模拟开关连在一起,作为数字电位器的抽头,这种模拟开关等效为单刀单掷开关,在数字信号的控制下每次只能有一个模拟开关闭合,从而将串联电阻的一个节点连接到滑动端。
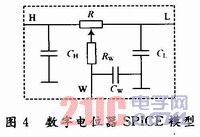
对数字电位器集成电路进行计算机仿真的SPICE(Simulation Program with Intergrate Circuit Emphasis)模型如图4所示。其中R为数字电位器的总电阻,RW为滑动端电阻,CW为滑动端的电容,CH和CL分别为数字电位器高端、低端对地的电容,因所论述的数字电位器工作在近似直流的条件下,所以不考虑其中的分布电容对电路性能的影响。
4 数字电位器选型过程
数字电位器选型时主要考虑以下指标:触点数;总阻值及误差;引脚电压;滑动端电阻及最大电流;温度系数。
4.1 触点数选择
因所选数控电位器线性控制电压在4.4~7.4 V之间,所以计算可得数字电位器触点数与最高控制精度之间的关系如表2所示。
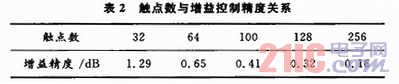
兼顾指标和成本,选择数字触点数为100或128的数字电位器。
4.2 数字电位器满量程电阻值选择
数字电位器常见的满量程阻值有以下几种:1 kΩ,10 kΩ,50 kΩ。
数字电位器阻值选取时需考虑:其工作电流要远大于V_ADJ端的电流,同时最大工作电流一般不超过3 mA。所以选取阻值为10 kΩ。
4.3 数字电位器其他参数选择
4.3.1 工作电压选择
由上述电路分析可知,数字电位器的I/O端口工作电压为0~15 V。
4.3.2 接口选择
数字电位器常见的接口包括以下8种:按键式接口,单线接口,I2C总线接口,三线加减式串行接口,SPI总线接口,Microwire总线接口和两线并行接口。受多通道接收机PCB板上面积限制,所选器件在保证性能的前提下优先选择引脚数比较少的器件。
4.3.3 偏置电路选择
为保证数字电位器步进精度,在总阻值为10 kΩ时,分压范围需处于4.4~7.4 V,所以需要为其选择合适的分压电阻R1和R2,其仿真电路如图5所示,仿真结果如图6所示。
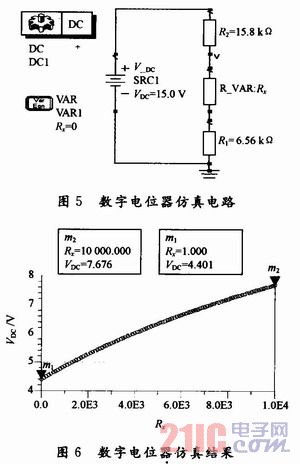
由图5和图6可见,在选取R1=6.56 kΩ和R2=15.8 kΩ后,可调电位器的阻值步进使控制电压处于线性段,从而达到线性调节通道增益的目的。
5 数字电位器X9312
X9312为Intersil公司的数字电位器,其主要性能参数如表3所示。
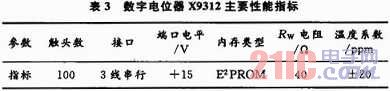
由表3可知,X9312满足多通道接收机增益调整电路对数字电位器的所有要求,下面主要对该器件RW电阻和温度系数对控制端电压的影响及接口设计进行简要分析。
5.1 滑动端电阻RW对控制端电压的影响
RW为数字电位器的触头电阻,电路中相当于在图3所示的R2和R_VAR之间串联了一个40 Ω的电阻。该电阻与R2(15.8 kΩ)串联分压最大为75 nV,所以可忽略该电阻对通道增益的影响。
5.2 温度系数对控制端电压的影响
X9312温度系数为±20 ppm,当R_VAR阻值为10 kΩ时,全温度范围内电阻值变化为±0.2 Ω,对分压基本无影响,所以认为数字电位器阻值在全温度范围内不变。
5.3 数字电位器控制电路设计
数字电位器通过处理机和三根数据线进行电阻的调节和数据的锁存,在此不详细分析其控制时序,仅讨论端的电路设计。
端在器件工作期间保持为低电平。当端和端同时为高时将当前的寄存器数据锁存入存储器,达到重新上电后数字电位器阻值不变的目的。所以端需要工作在高或者低的状态下,为达到该目的,将端通过10 kΩ下拉电阻进行接地。加过下拉电阻后的端正常工作时为低电平,需要锁存数据时,外部将该端电平设置为高即可。控制接口电路图如图7所示。

6 高低温测试数据分析
在高温和低温条件下对数字电位器电路进行测试,为了忽略放大器增益随温度变化对数字电位器分压特性的影响,选择测量V_ADJ端电压进行记录。只要V_ADJ端控制电压控制特性良好就说明数字电位器有良好的分压特性。
全温度范围内测得的V_ADJ端电压与仿真及计算结果相同,控制端电压变化小于1 mV,所以仅用常温数据绘制V_ADJ电压与数字电位器控制值的关系。结果如图8所示。

由图8可知,当数字电位器的控制值步进时,V_ADJ端电压近似线性地进行步进,从而使放大器增益以0.47 dB步进调整。证明可以用数字电位器来代替模拟电位器进行多通道接收机的幅度校准。
7 结语
由上述论述可知,X9312完全可以满足雷达多通道接收机对增益调整的要求。所需外围电路与传统的机械电位器相比有所增加,但是可以明显地提高雷达多通道接收机在温度、湿热和振动条件下的可靠性。