
一、系统概述
电梯行业是一个特种行业,国家对电梯的设计、制造、安装以及使用都有详细的国家标准。电梯的主要部分有土建、机械和电气等组成,机械部分有导轨、轿厢、对重、钢丝绳以及其他机械部分。电气部分有主控制板,变频器、曳引机等部分构成。电梯的运行在主控制板的指令控制变频器,有变频器驱动曳引机带动轿厢运行。变频器作为电梯中系统的核心部件,对电梯的安全可靠的运行是非常重要的。同时系统也对变频器有一些特殊的要求。许多公司针对电梯的特殊要求,推出了电梯专用变频器来满足电梯的特殊要求。而西门子的通用多功能变频器MM440采用具有现代先进技术水平的绝缘栅双极型晶体管(IGBT)作为功率输出器件,具有很高的运行可靠性和功能的多样性,采用脉冲频率可选的专用脉宽调制技术,可使曳引机在低噪声下运行,系统更加平稳。全面而完善的保护功能为系统提供了可靠而良好的保护性能,高性能的矢量控制技术,有多种控制方式灵活选用,适用不同的领域。在电梯控制系统中,采用的是闭环矢量控制。具有快速的动态响应特性和超强的过载能力。众多的自由功能模块通过BICO(二进制互联连接)组成了大量资源供用户使用,从而完成复杂的多种控制。正是MM440强大而灵活的功能可以胜任电梯控制系统的要求。通过MM440驱动异步曳引机构成的电梯系统完全满足国标GB7588-2003《电梯制造与安装规范》,GB/T10058-1997《电梯技术条件》的要求。
二、系统的组成和基本原理
电梯是一个复杂的系统,本文就针对由MM440和曳引机主控板组成的电气控制系统进行介绍。如图1所示。
电源经空气开关Q接电源接触器KMC之后连接到变频器的进线端RST,变频器出线端UVW经接触器KMY连接到曳引机构成了系统的主供电回路。在上电后主控制板闭合KMC一直带电,为变频器自身提供电源和系统动力。并且使变频器初始化,并把初始化的结果通过GZ节点输出给主控制板,而运行接触器KMY平时是断开的,在电梯需要启动时在启动KMY使曳引机带电。
在曳引机的驱动轴上安装有旋转编码器,经过屏蔽线接到变频器的信号输入端PGP、PGM、PFA、PFB构成闭环控制,同时也把输出信号也经过屏蔽线接到主控制板APCR的型号输入端,以便主控制板控制电梯的正常运行。

图1:电气系统原理图。
MM440变频器采用多段速控制方式,主控制板APCR根据内选以及外呼等命令,计算出要去的目的楼层,此时首先闭合KMY,根据上行或者下行命令接通FWD或者REV,使变频器建立励磁,输出转矩。变频器输出运行信号RUN,之后经过一定的时间打开抱闸YB。再根据启动设置不同的段速输出到多段速端子SS1、SS2、SS3。变频器就会按照预先设定的速度曲线控制曳引机运行。
停止时主控制板APCR首先在预定的减速距离把运行多段速改为爬行速度输出给变频器数字输入端子SS1、SS2、SS3,变频器就会按设定的速度曲线控制曳引机到爬行速度,到将要平层时首先去掉多段速信号,然后下闸,最后去掉方向信号,完成一次启停过程。下面就分析变频器是如何根据APCR的命令完成电梯的控制的。
一、系统概述
电梯行业是一个特种行业,国家对电梯的设计、制造、安装以及使用都有详细的国家标准。电梯的主要部分有土建、机械和电气等组成,机械部分有导轨、轿厢、对重、钢丝绳以及其他机械部分。电气部分有主控制板,变频器、曳引机等部分构成。电梯的运行在主控制板的指令控制变频器,有变频器驱动曳引机带动轿厢运行。变频器作为电梯中系统的核心部件,对电梯的安全可靠的运行是非常重要的。同时系统也对变频器有一些特殊的要求。许多公司针对电梯的特殊要求,推出了电梯专用变频器来满足电梯的特殊要求。而西门子的通用多功能变频器MM440采用具有现代先进技术水平的绝缘栅双极型晶体管(IGBT)作为功率输出器件,具有很高的运行可靠性和功能的多样性,采用脉冲频率可选的专用脉宽调制技术,可使曳引机在低噪声下运行,系统更加平稳。全面而完善的保护功能为系统提供了可靠而良好的保护性能,高性能的矢量控制技术,有多种控制方式灵活选用,适用不同的领域。在电梯控制系统中,采用的是闭环矢量控制。具有快速的动态响应特性和超强的过载能力。众多的自由功能模块通过BICO(二进制互联连接)组成了大量资源供用户使用,从而完成复杂的多种控制。正是MM440强大而灵活的功能可以胜任电梯控制系统的要求。通过MM440驱动异步曳引机构成的电梯系统完全满足国标GB7588-2003《电梯制造与安装规范》,GB/T10058-1997《电梯技术条件》的要求。
二、系统的组成和基本原理
电梯是一个复杂的系统,本文就针对由MM440和曳引机主控板组成的电气控制系统进行介绍。如图1所示。
电源经空气开关Q接电源接触器KMC之后连接到变频器的进线端RST,变频器出线端UVW经接触器KMY连接到曳引机构成了系统的主供电回路。在上电后主控制板闭合KMC一直带电,为变频器自身提供电源和系统动力。并且使变频器初始化,并把初始化的结果通过GZ节点输出给主控制板,而运行接触器KMY平时是断开的,在电梯需要启动时在启动KMY使曳引机带电。
在曳引机的驱动轴上安装有旋转编码器,经过屏蔽线接到变频器的信号输入端PGP、PGM、PFA、PFB构成闭环控制,同时也把输出信号也经过屏蔽线接到主控制板APCR的型号输入端,以便主控制板控制电梯的正常运行。
图1:电气系统原理图。
MM440变频器采用多段速控制方式,主控制板APCR根据内选以及外呼等命令,计算出要去的目的楼层,此时首先闭合KMY,根据上行或者下行命令接通FWD或者REV,使变频器建立励磁,输出转矩。变频器输出运行信号RUN,之后经过一定的时间打开抱闸YB。再根据启动设置不同的段速输出到多段速端子SS1、SS2、SS3。变频器就会按照预先设定的速度曲线控制曳引机运行。
停止时主控制板APCR首先在预定的减速距离把运行多段速改为爬行速度输出给变频器数字输入端子SS1、SS2、SS3,变频器就会按设定的速度曲线控制曳引机到爬行速度,到将要平层时首先去掉多段速信号,然后下闸,最后去掉方向信号,完成一次启停过程。下面就分析变频器是如何根据APCR的命令完成电梯的控制的。
三、MM440变频器的设置和应用
根据电梯的速度、曳引比以及电梯的载重来确定曳引机的转速和功率,当曳引机的功率和电压确定之后,变频器的选型要和曳引机想匹配,一般是选取大于曳引机功率的上一个档次的数据来选择。不能小也不能太大,太大不但造成成本的上升,而且导致控制精度的降低。使整个系统的性能下降。
直接按图1接好线后,变频器是不能运行的,必须对变频器进行正确的设置。首先是变频器的快速调试,这是变频器“能转起来”的基本步骤。快速调试的目的是完成变频器最基本的设置,决定变频器的基本工作方式的选择,对曳引机的参数进行“学习”,使变频器和曳引机匹配起来,更加精确的完成控制控制任务。在快速调试中,要输入曳引机的基本参数,包括电压、
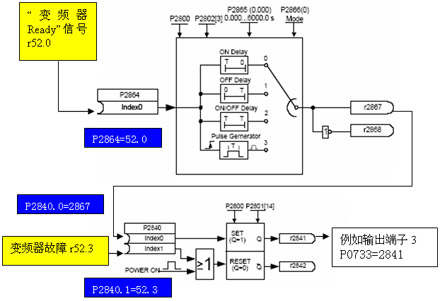
图2
电流、功率、功率因数、额定频率等参数,根据MM440的数据手册要求按曳引机名牌上的数据输入,其他的几个重要参数P0300要选择异步电机,命令源P0700选用数字量输入方式,选择2,并且在之后的调试中使P0701~P0708设置为17,各个数字量输入按照设定功能进行参数化。P1300控制方式选择23,带传感器的矢量转矩控制,这样才能满足电梯控制的要求。按照步骤最后在P3900中输入3快速调试结束并进行电动机的数据计算。
变频器的快速调试完成之后,这只是第一步,还不能控制电梯的运行还要进行多段速的设置,RUN信号的输出设置,以及闭环控制的PI制设置、S速度曲线的各个时间的设置等等。
变频器每次上电后要进行本身的初始化工作,由于所选用的功能模块不同,很可能在没有完全初始化完成后前输出变频器准备好,可以工作的信号,这时若有呼梯信号主板就会输出给变频器信号驱动电梯运行,这就造成系统的不正常工作,给安全运行带来危害。为确保变频器完全初始化好,对信号经过一个定时器延时输出,同时主板要求变频器输出的信号为保持型的,为此在把信号经一个RS触发器保持,如图2所示。此时,真正的“Ready”信号就是RS-触发器的输出r2841了,将r2841连接到输出端子上即可(例如,P0733=2841)。

图3:多段速输出选定。
多段速的选择与实现是利用参数P0722.0~P0722.7存放了数字输入1~7的状态,如图3所示当把P701~P703设置为17后,变频器会自动把图3种的参数设置为如下的值:P1020=722.0,P1021=722.1,P1022=722.2。当输入状态变化时,会选择P1001~P10016中的速度值防御参数r1024中,再把r1024的值连接到主给定通道上作为多段速的输出值。
当主控制板通过端子输入给变频器,变频器就会按设定的速度控制曳引机运行,电梯的一次启动和停止曲线如图4所示。在启动过程中,加速度起始段曲线有P1130来确定,加速度直线段有参数P1120来确定,加速度结束段曲线由参数P1131来确定。之后进入匀速运行阶段。在减速起始段曲线由参数P1132来确定,减速直线段由参数P1121确定,减速结束段曲线由参数1133来确定。上述参数的单位为时间,要根据速度时间换算成速度和加速值,并根据电梯技术条件和规范的要求来调整,满足舒适感和效率的要求。
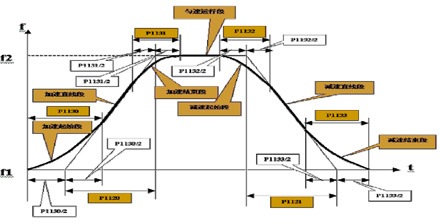
图4:电梯运动速度曲线。
除了上述参数外,还有俩个参数对电梯的未定运行和舒适感非常重要,速度调节器比例系数P1460.0 ,速度调节器积分常数P1462.0, 图5是P1460.0和1462.0的调整情况,图中A为速度
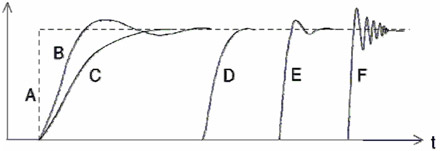
图5
给定信号,B、C、D、E、F为反馈信号,B为P1460和P1462都偏小,C为1460偏小,但高速事震动小,低速控制效果比较差。E轻微超调,P1460偏大,P1462偏小,低速是控制效果好,但高速时会有一些振动。F为严重超调P1460太大,P1462偏小。D的效果最好,调整时先进可能的加大P1460,到不产生超调为止,之后在尽可能加大P1462,以不产生振荡为止。
四、应用前景以及问题
目前,许继电梯公司已经有2000台电梯应用西门子MM440变频器在投入运行,运行稳定可靠,全部是应用于异步曳引机的直梯。在同步曳引机和扶梯上还没有应用,如何挖掘MM440强大的功能,使之应用于同步曳引机和扶梯等控制系统的应用,是下一步研究的课题。