
1 μC/OS-II的任务调度算法分析
1.1 μC/OS-II任务就绪表的解读
μC/OS操作系统采用优先级至上的任务调度原则,让进入就绪态任务中优先级最高的那个任务,一进入就绪态就能立即运行。μC/OS操作系统实现了一种巧妙的查表算法,利用这种算法能快速实现任务调度原则。如何从任务就绪表中,查找优先级最高的那个任务?归结起来:
两个变量(OSrdyGrp、OSRdyTb1[])和两张表(OSMapTb1[]、OSUnMaTb1[])。
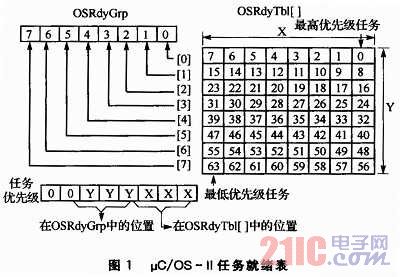
μC/OS操作系统可支持64个任务,每个任务被赋予不同的优先级——从0级到最低优先级OS_LOWEST_PRIO,最末两个为操作系统所用,分别为统计任务和空闲任务的优先级。μC/OS-II任务就绪表如图1所示。判断任务就绪同样根据OSRdyTb1[]和OSRdyGrp两个变量来完成:OSR-dyTb1[]按任务优先级分成8组(即每一组8个任务优先级),当任务处于就绪状态时,对应的位为1,反之则为0;OSRdyTb1口组中任何一位为1时,对应的OSRdyGrp位置1。
使任务进入就绪状态和脱离就绪状态,都是通过OSRdyTb1[]和OSRdyGrp这两个变量来查找OSMapTb1[]表完成的:
①进入就绪状态。
![]()
任务优先级的低3位用于确定任务在总就绪表OSRdyTb1[]中的位置。紧接着前面的3位用于确定是OSRclyTb1[]数组的第几个元素,两个变量都置1。
②脱离就绪状态。
![]()
代码将就绪任务表数组OSRdyTb1[]中相应元素的相应位清0,而只有当这一组中的所有任务都为脱离就绪态时,OSRdyGrp变量才会为0。
1.2 高优先级任务的查找
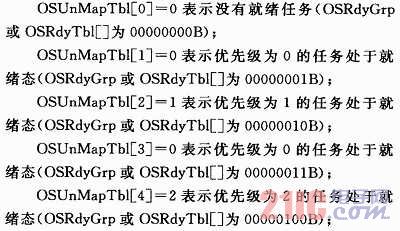
从任务就绪表中查找最高优先级任务,即从OSRdyTb1[]变量中找到最低为1的位是第几位(对应的就是最高优先级任务)。μC/OS-II采用查表的方式来找出处于就绪态的最高优先级任务,μC/OS-II中有一张256个单元的数据表OSUnMapTb1[],表中按一定规律有128个O,64个1,32个2,16个3,8个4,4个5,2个6,1个7,还有1个0,共256字节。OSUnMapTb1[]的定义如下所示:

找出进入就绪态的最高优先级任务的代码如下:
![]()
![]()
初看这张表感觉杂乱无章,实际是很有规律的。以“OSUnMapTb1[0]~OSUnMapTb1[15]:0,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,/*0x00~0x0F*/”为例说明:
其他依次类推。
下面再以一个实例进行说明:假设变量OSRdyGrp=01011000B,表示变量OSRdyTb1[3]、OSRdyTb1[4]、OSRdyTb1[6]有任务处于就绪状态,任务调度是去查找最高优先级任务(y=OSUnMapTb1[0x58])。由于OSRdyTb1[3]>OSRdyTb1[4]>OSRdyTb1[6],结果y=3。如果OSRdyTb1[3]=1000 0001B,则通过查表x=OS-UnMapTb1[OSRdyTb1[3]],即可得到x=O,表明这组数中第0位为1处于最优状态。这样,prio=(y<<3)+x=(3<<3)+0=24。再利用这个优先级的值,查找任务控制块优先级表OSTCBPrioTb1[],得到指向任务的任务控制块OS_TCB。
2 Cortex-M3中μC/OS-II任务调度的硬件实现
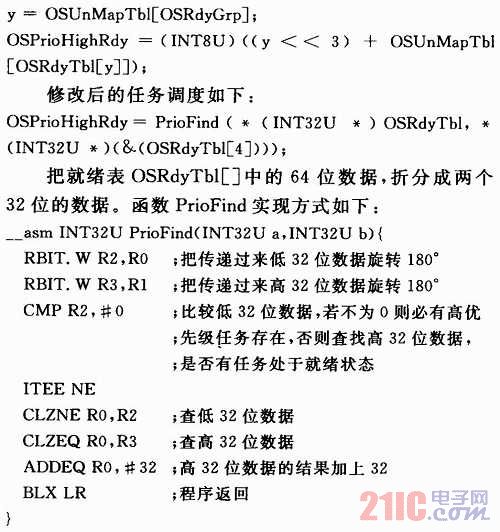
Cortex-M3采用精简指令集,采用Thumb-2指令,其中包括基于RTOS的硬件算法指令(CLZ),可以通过这种指令查找处于就绪态的最高优先级任务。μC/OS-II中任务的就绪态是反映在OSRdyTb1[]变量中,共计8字节(64位),对应64个任务。可以将其折分成两个32位的数据,然后分别查找这两个32位的数据中优先级最高的任务。先查找低32位,如果低32位中不为零,则找出其中最高优先级任务;否则查找高32位,找出其中最高优先级任务,高32位的的查找结果应加上数值32。
Cotrex-M3中通过以下两条指令就可完成最高优先级任务的定位:RBIT和CLZ。RBIT的含义是把一个32位数据水平旋转180°;CLZ的含义是计算前导零的个数。
假设在OSRdyTb1[]的低32位数据中,00000000000000000000000000001100B表示优先级为2的任务和优先级为3的任务处于就绪态,现在要通过指令RBIT和CLZ找出优先级为2的任务并调度运行。运行RBIT后数据变为:00110000000000000000000000000000000000。运行CLZ后计算出前导零的个数为2,表明优先级为2的任务处于最高就绪态。
μC/OS-II中的任务调度是通过查两次表完成最高优先级任务的查找,方法如下:
上述代码在MDK4.12软件中测试,系统时钟采用8 MHz,按照此方法进行任务调度可节省0.5μs,同时还减少了用来存放OSUnMapTb1[]的256字节的空间,缩短了代码运行时间,提高了CPU的利用率。此方法在μC/OS-II的任务通信中也同样适用。在此不再赘述。
结语
本文主要对μC/OS-II中的任务调度算法作了分析,特别阐述了OSUnMapTb1[]表是如何构成的,同时介绍了基于ARM Cortex-M3处理器平台的μC/OS-II的任务调度硬件实现方法,简化了μC/OS-II的代码,提高了处理器的性能。