
1 引言
交流变频调速的方法是异步电机最有发展前途的调速方法。随着电力电子技术、计算机技术和自动控制技术的不断发展,交流电机变频调速已经逐步取代直流电机调速,并经历了采用电压频率协调控制、转差频率控制、矢量控制以及直接转矩控制的发展过程。其中,转差频率控制技术的采用,使变频调速系统在一定程度上改善了系统的静态和动态性能,同时它又比矢量控制方法简便,具有结构简单、容易实现、控制精度高等特点,广泛应用于异步电机的矢量控制调速系统中。鉴于以上优点,本文对转差频率控制的异步电机矢量控制调速系统进行了研究分析和仿真。使用MATLAB中的仿真工具箱SIMULINK为基于转差矢量控制的异步电动机变频调速系统建立了仿真模型,并给出了仿真结果。
2 转差频率矢量控制的基本概念
矢量控制的思想是以转子磁场为定向,通过转子磁场定向的旋转坐标变换实现励磁和转矩的解耦,从而可以达到和直流电机一样的控制效果。转子磁场定向有两种方法:①通过设置观测器估计转子磁场空间角;②通过对转差角频率和转子角频率积分得到转子磁链的空间位置。第二种方法即转差矢量控制的依据。转差矢量控制不必检测磁通,简单易行,受到人们的普遍重视并得到广泛应用。
转差频率矢量控制不需要进行复杂的磁通检测和繁琐的坐标变换,只要在转子磁链大小不变的前提下,通过检测定子电流和转子角速度,经过数学模型的运算就可以间接的磁场定向控制。要提高调速系统的动态性能,主要依靠控制转速的变化率,显然,通过控制转差角频率就能达到控制的目的。转差频率矢量控制就是通过控制转差角频率来控制转速的变化率,从而间接控制电机的转速。
3 转差频率矢量控制的变频调速系统
转差频率控制的异步电动机矢量控制系统的结构如图1所示。该系统为磁链开环、转差型矢量变换控制的交-直-交电流源变频调速系统。
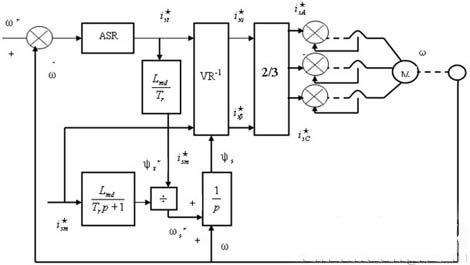
在转差频率控制交-直-交电流源变频调速系统的基础上,把从稳态特性出发的和函数关系换成从动态数学模型出发的矢量变换控制器,就得到转差型矢量变换控制系统。这样,转差频率控制系统的大部分不足之处都被克服了,从而大大提高了调速系统的动态性能。
这个系统的主要特点如下:
1)转速调节器的输出信号是定子电流转矩分量的给定信号,与双闭环直流电动机调速系统的电枢电流给定信号相当。
2)定子电流励磁分量给定信号和转子磁链给定信号之间的关系是靠矢量变换控制方程式的磁通控制方程式建立的,其中的比例微分环节 使 在动态中获得强迫励磁效应,从而克服实际磁通的滞后。
3)定子电流励磁分量给定信号和转子磁链给定信号经直角坐标/极坐标变换器后产生定子电流幅值给定信号。
4)定子频率信号,这样就把转差频率控制的主要优点保留下来了。由积分产生决定M轴(转子磁链方向)相位角φ的信号 。
4 转差频率矢量控制调速系统仿真和分析
4.1 仿真模型的建立

图2是转差频率矢量控制变频调速系统的MATLAB仿真模型.异步电动机由一个电流控制型PWM变流器供电,驱动一个机械负载(用惯量J、摩擦系数B和负载转矩TL表示).它由异步电动机模块、异步电动机测量模块、变频器模块、速度调节器、电流调节器、函数发生器、三相可控振荡器以及测量模块等构成。
4.2仿真结果
电动机的参数:设置异步电动机的参数:2.238 ,220 ,2极,定子电阻 =0.435 ,定子漏电感 ,互感 ,转子电阻 ,转子漏感 ,转动惯量 ,摩擦系数 。
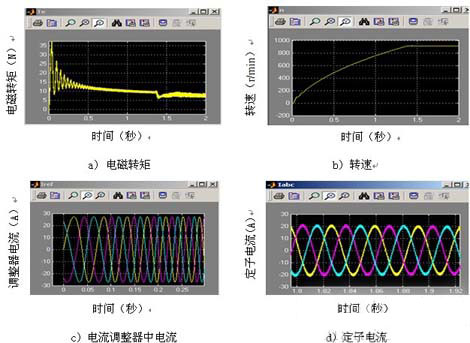
开始仿真,在示波器模块上分别观察转矩、转速、电流调整器中电流和定子电流,仿真波形如图3所示。可以观察到,大约经过1.5s,系统达到稳定状态.更改图2中给重新启动仿真,能观察到不同的驱动响应.
从以上仿真结果,可以看出在启动和加载过程中,电动机的转速、电流调整器中的电流、定子电流和转矩的变化过程。从(b)可以看出随着频率的增加转速逐步提高,在t=1.5s的加载过程,转速有一定的波动,稍后调整后稳定在给定转速。从(a)中可以看出电动机在零状态启动时,电动机磁场有一个建立的过程,在建立过程中磁场变化是不规则的,这也引起转矩的变化,但最终趋向稳定。又因为异步电机矢量控制没有直流电机的换向过程,所以其控制性能完全可以与直流调速性能相媲美。另外,通过仿真结果可以看出转差频率控制的矢量控制系统具有良好的控制性能。
5结论
矢量变换控制系统结构简单,思路清晰,所能获得的动态性能基本上可以达到直流双闭环控制系统的水平,得到了普遍的应用。
转差型矢量变换控制系统M、T坐标的定向是由给定信号确定并靠矢量变换控制方程式保证的,并没有在系统运行过程中实际检测转子磁链的相位,这种情况属于间接磁场定向。在动态过程中,实际的定子电流幅值及相位与给定之间总会存在偏差,而且电动机参数的变化也使实际参数与矢量变换控制方程中所用的参数不一致,这些都会磁场定向上的误差,从而影响系统的动态性能。这是间接磁场定向的缺点。为了解决这个问题,在参数辨识和自适应控制方面做了许多研究工作,获得不少研究成果。
从另一方面,要使矢量变换控制系统具有和直流电动机调速系统一样的动态性能,转子磁通在动态过程中是否真正恒定是一个很重要的条件。图1所示的系统中对磁通的控制实际上市开环的,在动态过程中肯定会存在偏差。要解决这个问题应该增加磁通反馈和磁通调节器,或采用实际转子磁链的定向,即直接磁场定向。