
摘要:本文介绍了气动控制元件在条并卷联合机上的设计应用,探讨了气动控制元件在HXFA368型条并卷联合机应用过程中所解决的主要问题。
1.引言:
随着科技的飞速发展,纺织机械设备制造业也迎来了革命性的发展,当前纺机设备的发展特点主要体现在:触摸式人机界面(HMI),可编程逻辑控制器(PLC)以及各种气动控制元件的广泛应用;目前不断提高纺机设备的自动化程度以减轻操作者的劳动强度和提高纺织厂的生产效率成为纺织机械生产厂家的一个重要的研发设计宗旨。而自动化动作的实现则普遍需要通过用PLC来控制电磁阀以及气缸等执行部件来实现。条并卷联合机是前纺中精梳准备工艺中生产效率最高的一种设备,HXFA368型条并卷联合机的自动化动作的实现需要通过压缩空气驱动气缸来实现,而压缩空气则是由PLC控制电磁阀来实现控制的。HXFA368型条并卷联合机采用了亚德客的电磁阀和气缸等气动元件来实现自动动作的执行。
2.应用设计
2.1 HXFA368型条并卷联合机的气动控制系统概述
一个典型的气动系统是由方向控制阀、气动执行元件、各种气动辅助元件及气源净化元件所组成。 HXFA368型条并卷联合机选用亚德客的电磁阀、气缸、压力表以及管接头做为标准配置,主气源进气处先通过三连件后再进入主气路,各个电磁阀用来作为相应动作单元上压缩空气通断的控制,电磁阀则由PLC控制器来实现逻辑上的控制,气缸的选用根据具体机械动作的实现来确定,气缸运动的速度根据相应的节流阀来进行调节
2.2HXFA368型条并卷联合机的动作流程概述
HXFA368型条并卷联合机的部分动作流程图:
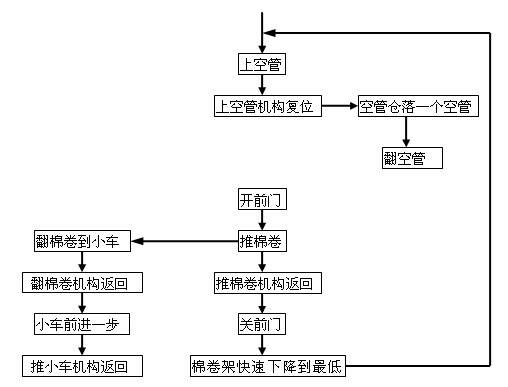
HXFA368型条并卷联合机部分动作流程图
HXFA368型条并卷联合机在当设定的棉网长度到时主电机转为低速,电磁离合器分、扯断棉网,主电机停,此时棉架快速上升,上升到位时打开夹盘,棉架暂停在最高位,开前门,前门打开后推棉卷,棉卷推出后推卷机构返回,推卷机构返回后关闭前门,前门关闭后棉卷架快速下降到最低位,然后再进入上空管的步骤;棉卷推出后执行翻棉卷到小车的动作,翻棉卷机构返回后小车前进一步,推小车机构返回。
HXFA368型条并卷联合机各种动作的实现均是通过气动执行元件来实现的,在气动控制系统中将压缩空气的压力能转换为机械能,驱动机构作直线往复运动、摆动和旋转运动的元件,称为气动执行元件。在条并卷联合机中是采用电磁阀来控制气缸来执行动作的,而电磁阀的动作则由PLC来控制,在本设备的控制系统中采用了中达电通有限公司的DVP60ES型PLC来控制整个系统工作;电磁阀及气缸则均选用亚德客有限公司的产品。
2.3 HXFA368型条并卷联合机的自动动作的实现
HXFA368型条并卷联合机具有机电一体化程度较高的特点,其主动力由11KW的变频电机通过变频来实现变频调速控制,各个分步动作的实现主要由电磁阀控制压缩空气驱动气缸来实现动作控制,上下空管、翻棉卷、棉卷支架上升下降、推棉卷、小车前进、前防护门开合、空管仓落空管以及送空管机构上升下降等动作都对应着相应的电磁阀和气缸,而整个动作的协调运作则有PLC控制器来实现控制功能,在此只做一个简单的概述。
2.4控制电磁阀的PLC程序设计概述
HXFA368型条并卷联合机上的各种自动动作的实现是通过用PLC控制电磁阀来实现的,下面是一段对部分动作进行控制的步进程序。
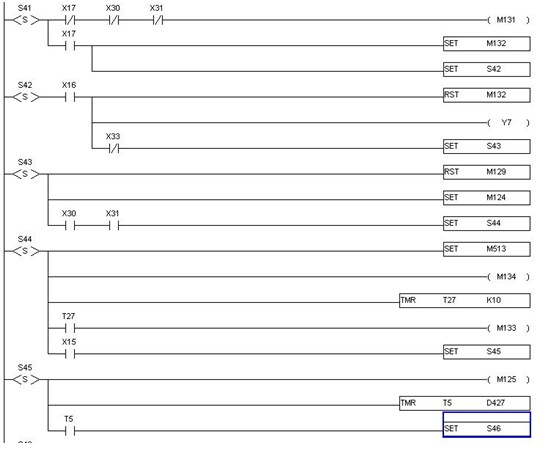
在程序中:
S41是“送空管上升”过程的控制,X17 是送空管机构上升限位位置检测点,X30是棉卷夹盘左合到位检测点,X31是棉卷夹盘右合到位检测点,M131继电器是实现对送空管机构上升动作的过程控制,程序中第一行的指令是在S41步进程序步的控制中当送空管机构没有上升到上升限位点而且左右夹盘均没有处于闭合状态的条件下执行送空管机构上升的动作。程序中第二行的M132继电器实现对送空管机构下降的控制,第二行的指令是在S41步进程序步的控制中当送空管机构已上升到上升限位点时实现对送空管机构下降的控制。第三行程序的指令是当送空管机构已上升到上升限位点时程序进入S42步进程序段即夹盘上升1mm步进段。
S42是“夹盘上升1mm”过程的控制,X16是送空管机构下降限位位置检测点,第四行程序实现的指令是当送空管机构复位时将送空管机构下降的动作复位;第五行程序实现的指令是通过Y7来控制相应的电磁阀以便实现棉卷夹盘上升1mm的控制;第六行中的X33是棉卷支架上升1mm和下降限位的检测点,第六行实现的指令是棉卷夹盘上升1mm后进入S43步进程序段。
S43是“上升1mm后夹空管”过程的控制,第七行中的M129继电器实现松开棉卷夹盘的控制功能,第七行实现的指令是对松开棉卷夹盘动作进行复位。第八行中的M124继电器实现的是闭合棉卷夹盘的控制功能,本行的指令实现的是实现控制闭合棉卷夹盘的命令;第九行实现的指令是当左右棉卷夹盘闭合时进入 S44步进程序段。
S44是“棉卷支架上升、落空管”过程的控制,在第十行的程序中M513继电器实现的是运行状态下棉卷支架保持的的控制功能;第十一行中的M134继电器实现的是空管仓落空管命令;第十三行执行的是延时2秒后翻空管命令。第十四行中X25是弹簧板处空管检测点,本行指令执行的命令是弹簧板处有空管时进入 S45程序步进段。
S45是“换卷后启动”过程的控制,第十五行执行的是启动低速运行控制指令。
PLC通过对各个自动动作的限位点的检测来实现对各个汽缸动作执行的协调,气缸是通过电磁阀控制的压缩空气来驱动的,具体动作执行的是否到位是通过传感器的检测来确定的。汽缸的运行速度则是通过调节节流阀来实现调节的。
2.4控制电磁阀的人机界面程序设计概述
在HXFA368型条并卷联合机上为了便捷的实现对各种自动动作的分立调试在此应用了台达DOP-AE10THTD型人机界面。通过人机界面可以方便的实现操作人员对各个电磁阀的实时控制,大大的方便了对各个自动动作的调试。
2.4.1 HXFA368型条并卷联合机上通过人机界面控制和调试电磁阀执行动作的界面设计。
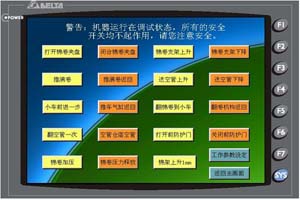
在此界面中通过对打开棉卷夹盘,推棉卷,翻空管一次等触摸键的操作可以实现对相应电磁阀的控制,电磁阀通过对压缩空气的控制来实现压缩空气对气缸活塞的驱动进而实现相应的汽缸动作。在设备的调试过程中调试人员先通过调试设定界面中的触摸键来控制单步动作的执行,然后根据实际操作的需要来调整节流阀,以此实现对气缸运行速度的调节。
3.HXFA368型条并卷联合机气动控制系统中常见故障及解决方法
3.1电磁阀故障
电磁阀做为一种执行元件受控于PLC控制器,由于棉纺织设备长时间处于24小时运作状态电磁阀长期动作易造成电磁阀吸合不到位或者彻底损坏两种情况,电磁阀吸合不到位在HXFA368型条并卷联合机上体现出来的状态是间歇性动作故障,进而引起设备间歇性故障停车,在此种状况下当对单个电磁阀进行检测时又不好判断出阀体埙坏,需要根据具体情况进行综合判断;在电磁阀彻底埙坏的情况下体现出来的故障情况是某个动作不执行,在此情况下可以根据实际情况更换相应的电磁阀来解决问题。
3.2传感器故障
在设备自动动作执行的过程中需要用传感器对气缸动作的执行进行限位检测以便PLC对设备的自动动作进行逻辑上的协调控制,检测传感器的选用一般有磁感应传感器和接近开关两种类型,检测传感器一旦损坏就会导致自动动作停留在某个动作位停止而不继续往下执行下一步动作。遇到这种故障情况时就应当根据自动动作执行的情况来查找个并更换相应受损的传感器。
3.3气缸故障
作为一种重要的执行部件气缸通常会因为长时间的运作而导致气缸内部的活塞出现漏气现象,这种故障情况下气缸所表现出的现象是在压缩空气送入气缸后气缸不动作或者动作力度及行程达不到相应的要求,遇到这种情况时就应当对损坏的气缸进行维修或者更换气缸。
4结论语
HXFA368 型条并卷联合机是一种自动化程度比较高的棉纺织设备,该设备是为棉纺织企业前纺工段中的精梳工序做准备的一种高效能棉纺设备,该型纺机设备经过多年来的改进提升总体性能和效率已经完全可以替代国外同类纺机设备如瑞士立达公司生产的E32型和E35型条并卷联合机,而其价位却仅为后者的三分之一左右,为国家节约了大量外汇。目前HXFA368型条并卷联合机已经广泛的应用在山东、河北、河南、陕西、甘肃以及湖南等多数棉纺织企业,其优良的性能已经得到了棉纺织企业用户的一致好评。
参考文献:
[1]. 潭浩强. C程序设计(第二版). 北京:清华大学出版社,1999.12。
[2]. 王兆义. 小型可编程控制器实用技术. 北京:机械工业出版社,1997.7。
[3]. 胡寿松. 自动控制原理. 北京:科学出版社,2001.2。
[4]. 周金冠. 精梳机研发创新与生产工艺设计. 北京:中国纺织出版社,2010.6。
[5]. DVP-PLC应用技术手册. 中达电通股份有限公司。
[6]. 殷洪义. 可编程序控制器选择设计与维护. 北京:机械工业出版社,2002.11。