
LIN总线简介
LIN(Local Interconnect Network)是一种低成本的串行通讯网络,用于实现汽车中的分布式电子系统控制。LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能,因此LIN 总线是一种辅助的总线网络。在不需要CAN 总线的带宽和多功能的场合,比如智能传感器和制动装置之间的通讯使用LIN 总线可大大节省成本。LIN 技术规范中除定义了基本协议和物理层外还定义了开发工具和应用软件接口。LIN
通讯是基于SCI(UART)数据格式,采用单主控制器/多从设备的模式。仅使用一根12V 信号总线和一个无固定时间基准的节点同步时钟线。这种低成本的串行通讯模式和相应的开发环境已经由LIN 协会制定成标准。LIN 的标准化将为汽车制造商以及供应商在研发应用操作系统降低成本。
典型的LIN 总线应用是汽车中的联合装配单元,如:门、方向盘、座椅、空调、照明灯、湿度传感器,交流发电机等。对于这些成本比较敏感的单元,LIN 可以使那些机械元件如智能传感器、制动器或光敏器件得到较广泛的使用。这些元件可以很容易的连接到汽车网络 中并得到十分方便的维护和服务。在LIN 实现的系统中通常将模拟信号量用数字信号量 所替换,这将使总线性能优化。在以下的汽车电子控制系统中使用LIN 来实现将得到非常完美的效果:
LIN节点硬件设计
1 LIN接口总体设计
LIN 节点硬件上主要包括LIN接口电路部分、控制输入部分、显示电路或负载驱动输出等,其中LIN接口为节点的核心。以Microchip公司的 PIC16F87为控制器、TJA1020为LIN收发器、SA57022 为开关电源的LIN接口电路如图1所示。SA57022电源输出的打开与关断由LIN收发器控制通过INH引脚控制。
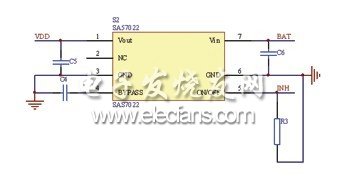
图1 LIN接口原理图
因主机节点需为网络中的从机节点提供时钟基准,故在主机节点中为PIC16F87配置了外部晶振。在从机节点中,从机节点可通过主机节点发送帧头中的同步场来校准自身波特率,故可省去外部晶振而使用PIC16F87内置的RC振荡器。
2 LIN收发器应用设计
TJA1020 为LIN收发器,它是LIN 协议控制器和LIN传输媒体之间的接口,是节点的核心器件,负责收发数据时总线的波形调整和电平转换及节点多种工作模式的实现。TJA1020按LIN物理层规范集成了片内从机端电阻,在从机节点应用中无须再外接从机端电阻,在主机节点应用中按图1所示在其INH引脚和LIN引脚之间串接主机端电阻和二极管可提高总线的驱动能力,并在总线对地短路时使节点自动进入睡眠状态,减少电流损耗。
以TJA1020为收发器构造的LIN节点具有普通、低斜率、睡眠、准备四种工作模式,以尽可能降低功耗和电磁辐射,各种模式下的节点状态和模式间转换如图2所示。
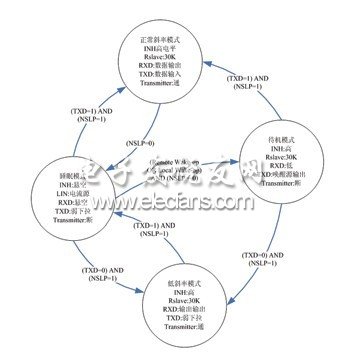
图2 工作模式的节点状态以及模式间的切换
LIN节点软件设计
1 LIN主机节点软件设计
LIN主机节点行使帧处理和LIN网络的通信管理职能,程序流程如图3所示。
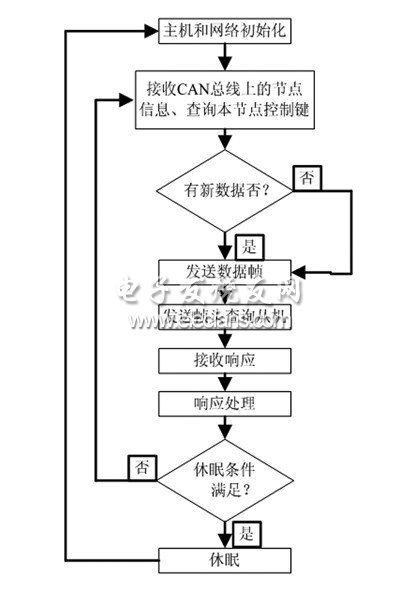
图3 主机程序流程
LIN规范规定,同步间隔场为至少13个连续的显性位(低电平)。LIN 通信基于通用UART/SCI接口,字节传送使用8N1编码,无法直接产生这样一个显性序列。
总线的正常通信波特率为9.6k,从机节点始终以此波特率工作,主机节点在需要发送同步间隔场时将波特率降低到4.8k,并发送0x00,则工作于9.6k 波特率的从机节点将检测到18个连续的显性位,从而判断一个新报文帧的到来。主机节点在发送完同步间隔场后将波特率恢复到9.6k.2 LIN从机节点软件设计
LIN从机节点的职能可概括为帧头检测与接收和帧处理这两部分。在每个报文帧的帧头中由配置晶体振荡器的主机节点通过同步场给从机节点提供波特率基准,从机节点通过测量同步场来校准自身波特率,以保证在报文传输中各节点之间的同步。
同步场逻辑值为0x55,波形如图4所示。从机节点通过测量同步场中第1和第5个下降沿之间的时间间隔来计算校准自身波特率。
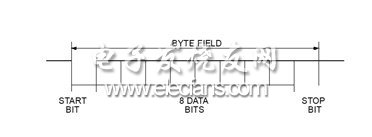
图4 同步场波形图
设主机节点和从机节点的串行口均工作于方式1(8位UART,波特率可变),主机节点波特率为B,从机节点以定时器测量同步场第1和第5个下降沿得到的计数个数为C,从机节点振荡器当前频率为fs,得到式(1)。
设从机节点计数器1作为波特率发生器工作于常数自动重新装入的8位定时器/计数器方式,得到式(2)。
使从机节点与主机节点同步,则令:
Bs=B
由式(1)~式(3)可得到式(4)。
从机节点以由式(4)计算得到的N值作计数器1产生波特率的重新装入值,可产生与主机节点一致的波特率。
节点制作与实验
利用该设计制作LIN节点构建LIN网络,对其进行了通信试验和初步的抗干扰试验。由于报文帧头和报文帧响应均由主机节点发送,报文帧帧头和报文帧响应间的帧间响应间隔较小。
当LIN从机节点在LIN主机节点的引导下相互传送指令或信息时,LIN网络上进行从机节点到从机节点的数据传输,此时LIN主机节点发送报文帧帧头,一个LIN从机节点发送报文帧响应,另一个或几个LIN从机节点接收报文帧响应。由于这种报文帧传送需要3个甚至3个以上节点参与,故预留了较长的帧间间隔,以便报文帧响应的发送节点和接收节点有充足的响应时间,确保报文帧传送的顺利完成。
当LIN主机节点向某从机节点请求数据时,LIN总线上进行从机节点到主机节点的数据传输,此时LIN主机节点发送报文帧头, LIN从机节点接收报文帧帧头后发送报文帧响应, LIN主机节点接收报文帧响应。
汽车电磁环境恶劣,因此汽车通信系统的抗干扰能力尤为重要,按该设计制作的LIN网络在BZ-5型汽车电火花干扰试验台上进行了抗干扰实验,试验中网络通信顺利,各项功能正常。
结束语
对总线式车身控制系统中的CAN/LIN混合网络进行深入研究,给出车身混合网络结构中主控节点设计与实现。在车身控制系统中,将LIN总线连入低速车身系统中,通过主控节点将CAN总线和LIN总线构建成混合控制网络,使其控制系统兼具可靠性、高性能和低成本优点。在器件选型上采用FREESCALE典型汽车电子芯片和智能触点检测模块,既实现了可靠网络控制功能,同时也降低汽车的开发、生产成本,具有较高实用性。