
1 引言
本项目实施于上汽集团在国内的生产基地。该生产基地主要从事乘用车、商用车的生产,本项目控制系统的主要功能是实现焊接生产线中主线和合装工位的自动控制,以及与其他工位的联锁控制。
2 项目设计
2.1 汽车制造工艺流程
汽车的生产制造由四大工序组成:冲压、焊接、涂装和总装。简单来说,冲压工序是完成车身各个部位零部件的加工;焊接工序是完成整个车身零部件的焊接;涂装工序是完成车身的喷涂;总装工序是完成发动机、座椅、汽车控制系统及内饰等的安装。主线和合装工位属于焊接工序,是焊接生产线的重要组成部分。本系统由夹具和电控系统组成。项目简要工艺流程如图1所示。
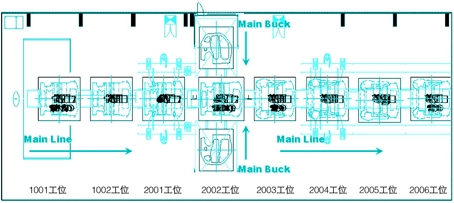
图1 工艺流程简图
2.2 自动化装配工位
(1) under body 1001 stn焊接夹具工位;
(2) under body 1002 stn焊接夹具工位;
(3) main line 2001 stn焊接夹具工位;
(4) main line 2002 stn 焊接夹具工位;
(5) main line 2003 stn 焊接夹具工位;
(6) main buck 合装 焊接夹具工位;
(7) main line 2004 stn 焊接夹具工位;
(8) main line 2005 stn 焊接夹具工位;
(9) main line 2006 stn 焊接夹具工位;
(10) shutter工位(车身总成搬送机构)。
1 引言
本项目实施于上汽集团在国内的生产基地。该生产基地主要从事乘用车、商用车的生产,本项目控制系统的主要功能是实现焊接生产线中主线和合装工位的自动控制,以及与其他工位的联锁控制。
2 项目设计
2.1 汽车制造工艺流程
汽车的生产制造由四大工序组成:冲压、焊接、涂装和总装。简单来说,冲压工序是完成车身各个部位零部件的加工;焊接工序是完成整个车身零部件的焊接;涂装工序是完成车身的喷涂;总装工序是完成发动机、座椅、汽车控制系统及内饰等的安装。主线和合装工位属于焊接工序,是焊接生产线的重要组成部分。本系统由夹具和电控系统组成。项目简要工艺流程如图1所示。
图1 工艺流程简图
2.2 自动化装配工位
(1) under body 1001 stn焊接夹具工位;
(2) under body 1002 stn焊接夹具工位;
(3) main line 2001 stn焊接夹具工位;
(4) main line 2002 stn 焊接夹具工位;
(5) main line 2003 stn 焊接夹具工位;
(6) main buck 合装 焊接夹具工位;
(7) main line 2004 stn 焊接夹具工位;
(8) main line 2005 stn 焊接夹具工位;
(9) main line 2006 stn 焊接夹具工位;
(10) shutter工位(车身总成搬送机构)。
2.3 电控系统设计
电控系统完成的主要自动化装配功能是:汽车地板、发动机舱、顶舱和左右侧围的焊接,以及与其他焊接工位的联锁控制。
电控系统由控制系统和生产现场两个部分组成。控制系统集中安装在主控制柜内。主控制柜内安装生产线plc控制器及i/o模块、变频调速器、信号端子排、电源单元和其他附属器件。系统还配有操作面板和触摸屏,用于电控系统的运行操作和运行状态及故障显示。
控制系统主要完成生产现场各种数据的实时采集及监控,并按焊装线的操作时序向生产现场执行机构发出控制指令。生产现场部分由各个工位上的按钮台,现场采集模块et200eco、现场信号传感器(行程开关)、驱动元件(电磁阀)、一套往复杆机构电机等组成。这一部分向控制系统提供操作人员的操作信号和各种现场设备的运行状态信号,同时接收来之控制系统的各种控制指令来驱动电磁阀、电机等执行机构。各个工位的传感器信号电缆和驱动元件的控制电缆集中到附近的i/o采集模块中,再通过profitbus总线同主控制柜plc相连。生产车间如图2所示。
2.4 分布式自动化平台
数字i/o点多而且比较分散,对电气故障安全性能要求高是汽车生产行业的特点,针对具体的工艺控制要求,我们提出了一套低成本、结构紧凑、配置灵活、高安全性能的控制系统。经过认真调研和周密思考,最终选择西门子s7-300plc作为控制系统。本系统选用cpu 315-2dp作主控制器,总线采用profibus通讯。现场操作台控制采用et200s扩展。现场各个工位的传感器信号和电磁阀控制采用分布式i/o et200eco模块。传送电机控制部分采用了simens的micromaster 440变频器,plc通过总线通讯控制电机的运行速度及运转方向。还有两套西门子的人机界面,采用的是mp270b。它们与plc都是通过 profibus进行通讯的。最终选定西门子的主要硬件配置如附表所示。

附表 主要硬件配置
3 控制系统设计
3.1 西门子s7-300
plc是控制系统的核心,控制的性能,适用性,可靠性和性价比是选型的依据。本系统的控制要求高稳定,高指令处理速度控制。并且要求安装简单、维护方便、扩展灵活、组网方便。基于西门子s7-300plc具有如下特点:
(1) 模块化微型plc系统及功能模块,满足中、小规模的性能要求;
(2) din标准导轨安装,安装简单,布置灵活;
(3) 简单实用的分布式结构和多界面网络能力,应用灵活多变;
(4) 0.6~0.1μs高速的指令处理,功能丰富的模块可以非常好地满足和适应自动化控制任务;
(5)编程软件step7,结构化程序开发思想,多种编程语言选择,编程灵活,高效。组态软件wincc,功能强大,画面丰富,使用方便。完全可以实现本系统的控制功能。
人机界面的选择,选用的是西门子的mp270b(规格:10.4" 640*480 256色),特点是可靠性高,组网方便,大屏幕,组态画面丰富,功能强大,从操作性,易用性,友好性上可以完全满足用户的要求。人机界面主画面如图3所示。
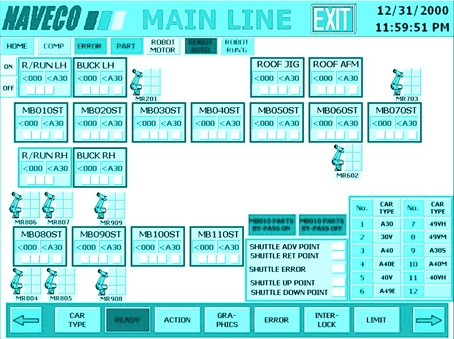
图3 人机界面i/o检测点画
经过缜密思考,最终我们选用了西门子s7-300 plc,考虑到系统的扩展以及与其它厂家西门子系统的互联,系统的通讯都采用了profibus,互连采用工业以太网,cpu选用的是315-2dp,通讯模块用的是cp343-1 lean和cp342-5。系统的硬件配置及系统结构如图4所示。
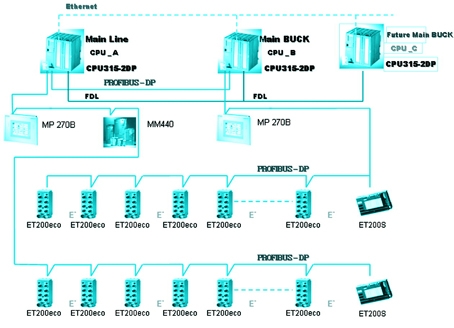
图4 系统结构
3.2 分布式装配线自动化系统
分布式i/o的选择,主要是根据汽车生产行业数字i/o点多而且比较分散,对电气故障安全性能要求高的特点,以安装简单,扩展灵活,结构紧凑,防护等级高,故障安全性能高为选型依据。系统选用的是西门子的et200s和et200eco分布式i/0。et200s是一种位-模块式的分布式i/o系统,它集成了siguard安全技术,精确模块化的面向功能的站结构,集成了profibus-dp连接的接口模块,可以在运行中更换使用着的模块,结构紧凑,安装简便,灵活性大,以及运行费用较低等特点。et200eco是西门子经济型的ip65/67的分布式i/o系统,它由profibus接口模块,m12或ecofast连接件,现场i/o的端子模块组成。
et200eco具有紧凑型、一体化的设计,高达p67的防护等级,采用了端子模块和接口模块分离的设计,端子模块上所有的i/o通道都支持短路保护和过载保护。同时支持通过profibus网络进行远程诊断等特点。硬件组态画面如图5所示。
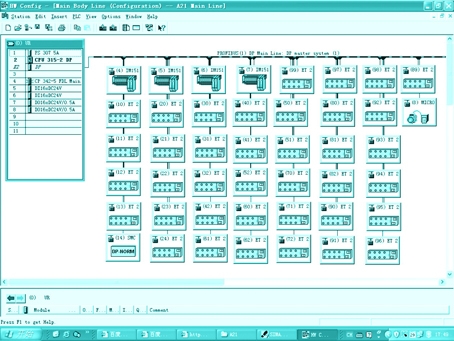
图5 工艺流程组态画面
3.3 控制系统功能设计
本系统允许操作者以两种方式进行操作——手动方式和自动方式。设备启动前应确保plc模块接线正确,电缆联接正确,并且cpu模块处于run状态。设备启动(自动方式),将各主控制柜的“自动/手动”转换开关置于“自动”位置。按主控制柜上的运转准备按钮,当主控柜上的“运转准备”指示灯点亮后按主控制柜上的自动启动按钮,当主控柜上的“自动启动”指示灯点亮后,设备启动(自动方式)完成。
(1) 手动控制:在手动方式下,由操作者在运行条件允许的情况下,手动控制设备的每一个动作。将主控制柜上的“自动/手动”转换开关置于“手动”位置。在“手动”控制状态,1001stn、1002stn和输送机构可通过触摸屏操作。2001-2006stn操作者可以通过操作台上的按钮来操作本工位的动作。在手动控制方式下,当满足以下条件时,可通过按钮来控制夹具动作。
(2) 自动控制:在自动方式下,由操作者启动设备的自动控制程序,由系统自动控制设备的运行。将主控制柜与各工位上的“自动/手动”转换开关均置于“自动”位置后按住“自动启动”按钮约三秒钟,系统进入自动状态,此时若将某工位操作台上的“自动/手动”转换开关置于“手动”位置,系统即停止自动运行。在自动控制方式下1001、1002工位上件后可通过工位旁的按钮操作相应夹具动作,其余工位地板夹具当车体放好后夹具自动夹紧。每个焊接完成后分别按钮该工位两侧的两个完成按钮后夹具会自动打开,顶升气缸自动将车体升起,待所有工位工作完成车体全部顶起后输送机构自动前进将车体整体向前移动一个工位。
(3) cpu故障:当cpu的sf指示灯点亮时,则cpu存在硬件或软件故障。当cpu出现不可处理故障时,cpu转入stop(停止)状态,设备不能运行。cpu故障的处理:关闭cpu电源,再重新上电;如故障仍然存在,则关闭cpu电源;接通cpu电源;执行复位cpu寄存器操作;如故障仍存在,则cpu存在硬件故障,更换cpu模块;重新下装plc控制程序;将cpu的运行模式置于运行模式。
(4) 直流电源保护:当为plc的数字量模块端子提供电源的24v直流电源输出端出现短路情况时,直流电源可能进入保护状态。此时直流电源输出端电压急剧降低,无法驱动系统的输入/输出设备。当出现直流电源保护时,需将直流电源输入端断开后再重新接通,系统即恢复正常。
(5) 急停报警:触发:当按下主按控制柜或任意工位操作面板或按钮台上的急停按钮时,将触发急停报警;影响:当急停报警触发后,所有工位及主控制柜急停报警灯亮,主控柜报警声音输出,触摸屏显示相应报警工位。报警将停止整条生产线设备的运行;复位:将各急停按钮恢复正常状态,并按下主控制柜或任意工位操作面板上的“故障复位”按钮,则急停报警信号被清除。
(6)压力报警:触发:在1001、2001、2003、2005工位左侧有个压力检测开关,用来检测气压的大小。当无气压或气压过小时,则压力检测开关发送信号,触发压力报警。触摸屏上压力故障指示灯亮;影响:触摸屏显示报警,主控柜报警声音输出。报警将停止整条生产线设备的运行;复位:压力状态恢复正常后,按主控柜或任意工位操作面板上的“故障复位”按钮,压力报警信号自动被清除,按启动顺序重新启动设备运行;
(7) 限位开关和电磁阀故障报警:触发:当控制夹具动作的电磁阀接通时间超过夹具动作所需的时间,而夹具动作到位的限位开关信号未返回时,或者当检测夹具开、关的限位开关信号同时存在时,触发限位故障报警,相应工位ls故障指示灯点亮;影响:限位开关故障报警将暂停相关工位的设备的动作;原因:气压过低导致夹具动作未到位。夹具与工件间的位置偏差导致夹具动作未到位。plc到电磁阀的控制线路故障导致电磁阀未动作。电磁阀故障导致电磁阀未动作。复位:当故障解决后按主控柜或任意操作台“故障复位”按钮,报警状态清除。
(8) 传送电机报警:触发:当传送电机过载,触发变频器报警;处理:传送电机报警将禁止shtl的动作;复位:当过载保护信号及变频器故障信号均消失后,按下主控制柜上的复位按钮,传送电机报警被清除。
(9) 车体落位异常故障:触发:在设备的每个工位有两个接近开关,用来检测车体落位情况。车体落位共三种状态:车体落位正常、车体落位异常、无工件。当一个接近开关感应到信号而另一个接近开关没感应到信号这种状态达到三秒示为车体落位异常,该工位车体落位异常故障指示灯亮;影响:该工位车体落位异常故障指示灯亮。该工位动作将停止运行;复位:车体落位状态恢复正常后,按主控柜或任意工位操作面板上的“故障复位”按钮,车体落位异常报警信号自动被清除,按启动顺序重新启动设备运行。
4 结束语
目前,本项目正处在试运行阶段,系统运行稳定、可靠。程序功能强大,画面操作友好、灵活、方便。获得该公司领导和技术人员的一致好评,深得现场操作人员的喜爱。据悉,等项目完全运行之后,该公司准备上二期工程。通过项目的实施和调试,对西门子的控制系统有了更深层次的把握,对西门子分布式i/o的应用有了更深的认识。
(1) 西门子的控制系统功能强大,模块丰富,组态灵活,扩展方便。
(2)西门子的编程软件step7,结构化程序开发思想,多种编程语言选择,编程灵活,高效。组态软件wincc,功能强大,画面丰富,使用方便。
(3)本系统的优点在于采用了profibus通讯和分布式i/o控制的结构模式,不但大大节省了控制线缆,而且充分发挥了西门子控制系统的优势,提高了系统的稳定性和可靠性。