激光跟踪仪作为一种高精度便携式的三坐标测量设备,在世界汽车制造业使用并不是一个新鲜事物。在欧洲,标致雪铁龙汽车公司和雷诺汽车公司已经大量采用了美国自动精密工程公司(Automated Precision, Inc缩写API)生产的TrackerIIPlus激光跟踪仪代替关节臂等其他现场测量设备,在中国,上海通用也已经选用两台美国API公司的TrackerIIPlus激光跟踪仪用于生产现场工装检测以及白车身和冲压件测量。今天的跟踪仪早已突破了早期跟踪仪外型笨重,校准频繁,操作复杂,受环境影响大等局限性,成为了现代汽车制造业中用途广泛的一种测量仪器。由美国API公司制造的TrackerIIPlus激光跟踪仪跟踪头重量仅有8.3kg,连接上配套的轻便三脚架后总重量也不超过20kg,可以在生产线上方便地安装。

API第三代激光跟踪仪 TrackerIII
激光跟踪仪的一个典型应用是用于焊装车间工装夹具的装调。车身焊装是整个汽车制造中最重要的环节之一,焊装质量的优劣不但关乎后续总装能否正常进行,对轿车来说更有可能影响到整个车身的强度和安全性。而焊装质量又直接取决于焊装夹具的定位精度。在过去,汽车生产线上工装夹具的最初安装定位,一般是先制造一部样车,样车精度通过固定式三坐标测量机来保证,然后将样车放置在工位上,调整夹头位置使各个工作面和样车贴合好,实际上这部样车起到了测量中传递样棒的作用。通过样车调节好各个夹头位置后,再用关节臂这类精度级别相对较低的现场测量设备进行复测检验。
激光跟踪仪辅助装调焊装夹具
关节臂由于测量范围很小,不可能在一个测量站位中测量到车身原始定位基准一孔一槽三个定位面,所以最初的坐标系往往需要通过一到两次移站来建立,这样关节臂所建的基准坐标系中必然包含移站误差,这直接限制了复测的精度级别,无法保证大范围内的相对位置精度。另外,众所周知,关节臂由于其原理上的局限性,实际使用寿命是相当短的,经过一段时间的使用,甚至是设备闲置后,关节部位轴承的磨损以及臂身的变形都会导致精度严重下降,而且这种精度下降是不可补偿的。因为上述原因,焊装夹具的定位精度实质上极大的依赖于样车精度,但样车作为样棒使用最致命的缺点是容易变形,样车本身只是一个精度级别较高的白车身,是一个壳体零件,虽然经过固定式三坐标测量机检测合格,但是在装运到现场以及后续装调过程中由于温度变化、外力作用等因素发生变形都是不可预测的,这部分误差将直接变成焊装夹具的定位误差。如果采用激光跟踪仪,首先在较大测量范围内不需要移站,能保证较高精度的基准坐标系(5m内精度为±0.025mm)。有了这个准确的基准坐标系,导入数学模型后可以直接用车身数模为比对基准来调整夹具定位面。因为夹具定位面的理论数模和车身上定位面的理论数模是重合的,所以无须为夹具测量专门创建数模。建立基准坐标系以后,将靶球放在需要调节的夹具定位面(定位销)上,软件计算出靶球中心坐标到定位面(定位销)数模的投影距离,根据靶球半径作补偿计算得到3D偏差的方向和数值,实时显示在计算机屏幕上,观察并调节这个偏差到公差范围内。采用这种测量工艺后,不再依赖样车精度,减少了误差传递的中间环节,同时节省了制造和测量样车的成本。优势是显而易见的。关节臂虽然从测量方法和软件上也能执行上述工艺,但是测量范围和精度都无法达到工艺的要求。激光跟踪仪本身以其自带的激光干涉仪作为长度标准,光栅码盘作为角度标准,通过自身的一系列校准程序,可以在整个产品寿命周期中始终保持高精度的工作状态。通常,在固定工作场所使用和存放的API激光跟踪仪,一般做自校准的周期可长达数月。而激光跟踪仪自校准所花费的时间则不超过十分钟。

API 5D/6D激光干涉仪
API公司不仅是激光跟踪仪在全球范围内的最初发明人,而且不断推出许多新的扩展技术。传统的激光跟踪测量技术在汽车行业遇到的最大挑战是光线阻断的问题,而现在这一难题有了两套行之有效的解决方案,一是绝对测距技术(absolute distance measurement. 缩写ADM),一是智能测头技术(Itelliprobe)。
传统的激光跟踪仪因为采用激光干涉的原理测量靶球到跟踪头的距离,要求激光头和靶球之间的光线始终不能被阻断,在测量汽车工装夹具时这点往往是很难保证的。API的绝对测距(ADM)技术允许跟踪过程中断光,甚至可以直接把靶球放到目标位置,然后再将跟踪头指向靶球进行测量,这是一种基于红外光脉冲反射拍频计数的绝对测距技术,其10m内精度可以高达0.02mm。这项技术在在线检测汽车夹具重复定位精度方面效果非常好。通常我们把光学靶安装在活动的夹头上,每次夹头到达工作位置后,软件驱动跟踪头指向光学靶的理论位置,实际每次夹头所处的位置都将偏离理论位置,跟踪头将在理论位置周围以螺旋线轨迹运动搜索光学靶,锁定目标后再用绝对测距技术测出光学靶到跟踪头的距离,从而计算出此时夹头所处的实际位置。在软件的配合下激光跟踪仪可以在极短时间(通常只需几秒钟)就测量出多个夹头的重复定位精度,且精度远远高于基于数码相机的交汇照相测量技术。
另外,API的TrackerIIPlus还支持一种智能测头技术,智能测头是一种特殊的光学靶。底部装有长度可达几百毫米的测杆,光靶设置在测头的顶端。智能测头内部集成的传感器,可以感知智能测头相对于激光光线的姿态角变化。通过顶端光学靶的坐标值和姿态角计算出底部测杆尖端的坐标值,这样就可以用测杆尖端去测量激光照射不到的工件背面以及较深的孔和槽。智能测头的外形如图3所示。

智能测头
激光跟踪仪像所有的三坐标测量设备一样,提供了丰富的建坐标方式,除了传统的三点建坐标、点线面建坐标、多点拟合坐标系等方式以外,还提供了一种独特的复杂拟合建坐标方式,这种建坐标方式允许使用工件上的任意曲面、平面、定位孔、定位点组合起来作为建坐标的基准,拟合计算出工件坐标系。

在工件数模上选择拟合坐标系基准
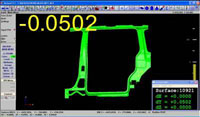
如图4所示,首先在导入的工件数学模型上选择适当的基准面上的表面点(对应工装上的定位面)和基准孔中心(对应工装上的定位销),然后依次测量工件上的这些基准元素位置,得到拟合计算的结果。如果定位基准属于过定位,通过分析结果数据,可以知道基准之间存在哪些冲突,然后再决定是否应该舍弃某些可能存在问题的基准(通过放弃某些拟合计算约束条件来实现),这种复杂拟合建坐标的功能使得激光跟踪仪可以代替各种机械工装检具来检测白车身和冲压件。具体方法是,首先固定好零件,选择工装检具检测时的定位元素(包括定位面和定位销)作为建坐标的参考基准,这样拟合得到的工件坐标系,就准确再现了机械检具检测时使用的工件坐标系,此时测量出的工件偏差和机械检具检测出的偏差数据一致,能准确反映工件的实际状态。这就是所谓的“电子工装”技术。白车身、焊装夹具、检具的检测需要遵循的原则就是,建坐标的基准和实际工件的安装定位基准或者工作基准保持一致,这样才能最大限度的减小测量坐标系带来的误差。采用这种基于数学模型的“电子工装”技术,在节省下制造机械工装的高额成本的同时也省去了对这些机械工装进行检测和维护的人力资源,可以大大提高生产效率。
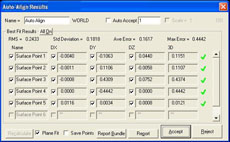
拟合计算的调整和计算结果
此外,激光跟踪仪也可以用于汽车外形设计。由艺术家在木模上雕刻设计的新车型,需要精确的变成计算机中的数学模型,在以往,这需要一台造价不菲的高精度大型导轨式三坐标测量机,而现在一台TrackerIIPlus激光跟踪仪,配合其功能强大的测量软件就能完成这套复杂的逆向工程,激光跟踪仪形式多样的动态扫描工作方式,能够精确反求出空间自由曲线、曲面的数学模型,从而大大降低冲压模具的生产制造成本,同时,激光跟踪仪也可以用于这些冲压模具和工件的检测。
激光跟踪仪测量技术在我国的汽车生产在线检测领域还是方兴未艾,在汽车制造业中推广应用有着广阔的前景。
参考文献:
[1]《激光跟踪测量系统的原理及在车身在线检测中的应用》,李广云。《上海计量测试》,2002年04期。
[2]《激光跟踪仪在大尺寸工件几何参数测量中的应用》,张春富、张军、唐文彦、卢红根。《工具技术》,2002年05期。
[3]《采用激光跟踪仪测量飞机外形》,韩清华、郑保、郭宏利、王鸿翔。《航空计测技术》,2004年01期。
[4]《使用激光跟踪仪确定数控机床空间位置关系》,刘晓东。《制造业自动化》,2004年08期。
