
1 车载移动终端
GPS车载移动终端采用世界领先的GPS全球卫星定位技术、无线通信技术及计算机数据处理技术,可为用户提供全方位、全时域空间位置信息。GPS车载移动终端在GPS移动信息服务系统中的应用结构如图1所示。
单片机的GPS车载终端设计与实现" src="http://files.chinaaet.com/images/20111025/af7aa42b-9fc0-4294-b3d4-27d5fbc0d1c4.jpg" />
通过GPS移动信息服务系统,车载移动终端可以实现如下基本功能:
(1)实时定位功能:运用GPS实现定位获得车辆高精度的位置及状态信息,通过电子地图系统查出车辆地理位置,实现定位和跟踪,并根据需要通知车主或控制中心。
(2)报警功能:为确保人、车安全,设计了多种条件下触发报警功能。
①紧急报警:当车主在遇到紧急情况、车辆故障、交通事故、医疗等情况下,只要按动紧急情况按键,即可通知车主家人、控制中心、汽车俱乐部。通过数据分析可得知车辆位置并设法尽快提供帮助。
②状态报警:可远程遥控设置超速、超加速、越界、停车时间过长、振动、车门动作、GPS无信号、蓄电池电压低等多种报警功能。报警后车主或控制中心会收到报警信息和车辆位置信息。状态报警可以由用户设定来选择各种报警有效与否。
(3)车载电话功能:可以实现完全的GSM车载电话功能。配接免提装置可实现免提通话功能,保证行车安全。
(4)汽车黑匣子功能:可记录汽车最近一段时间的运行状态和轨迹。可根据设置记录一定时间或距离的汽车状态和轨迹,为运营和交通事故处理提供依据。
(5)汽车防盗器:具有近程和远程控制及报警功能。近程可通过RF来实现遥控解除和设置警界状态功能;远程可通过GSM网络将汽车状态通知车主或控制中心,且车主和控制中心可遥控解除和设置警界状态。
(6)具有严格的密码认证功能,车主具有隐私权。
2 GPS车载移动终端设计
GPS车载移动终端主要由GPS模块及天线、GSM通信模块、微处理器、LCD液晶显示模块、键盘等单元组成。
2.1 主要硬件模块选型
2.1.1 微处理器
GPS是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。GPS是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、 全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。
GPS车载移动终端中控制器的选择至关重要,它不仅影响整个系统的性能,而且关系到车载移动终端的成本。本车载移动终端选择美国CYGNAL公司的C8051F020单片机做处理器。C8051F020与一般的8051相比,其优点在于:(1)运行速度快。芯片采用流水线指令结构,70%的指令其执行时间为1个或2个系统时钟周期,当工作在最大系统时钟频率25MHz时,执行速度可达25MIPS.(2)ADC采样速率高,可达到500Kbps,不必外加ADC芯片就能满足需要。(3)片内存储空间大。(4)调试方便。(5)安全机制可靠。(6)外部资源丰富,有8个8位的I/O端口,硬件有SMBus(I2C兼容)、SPI及2个增强型UART串口等。
2.1.2 GPS模块
GPS模块选用瑞士U-BLOX公司的TIM GPS接收器。瑞士U-BLOX公司专门从事GPS集成电路开发,其突出特点是可以将高性能GPS定位接收机做得非常小。TIM GPS接收器自身包含低功耗GPS接收器,尺寸仅为25.4mm×25.4mm×3mm,相当于一个普通芯片的大小,非常适合于对尺寸要求严格的高端应用,如手机、PDA、车载导航等GPS的应用。
2.1.3 通信模块
TC35是SIEMENS公司推出的新一代无线通信GSM模块,可以快速、安全、可靠地实现系统方案中的数据和语音传输、短消息服务(Short Message Service)及传真。模块的工作电压为3.3~5.5V,可以工作在900MHz和1800MHz 2个频段,所在频段功耗分别为2W(900MHz)和1W(1800MHz)。模块有AT命令集接口,支持数据、语音、短消息和传真服务等。此外,该模块还具有电话簿功能、多方通话及漫游检测功能。常用工作模式有省电、IDLE和TALK等模式。通过独特的40引脚的ZIF连接器,实现电源连接、指令、数据、语音信号及控制信号的双向传输。通过ZIF连接器及50Ω天线连接器,可分别连接SIM卡支架和天线。
2.2 GPS车载移动终端的工作原理
TIM GPS接收机通过GPS天线接收卫星信号,解算出车载移动终端的位置信息,一方面存储于缓冲区中,作为日后路径回放用,另一方面直接由单片机通过串口发送到GSM模块。GSM模块再通过GSM短消息方式把位置信息发送到监控中心。监控中心通过GIS软件平台就可以直观、清晰地在电子地图上发现车辆的轨迹,实现车辆的实时监控。另外,车载终端也可以发送报警信息和语音信息到监控中心;监控中心也可以通过文字或语音的方式对车辆实施调度。

2.3 GPS车载移动终端的软件设计
2.3.1 GPS数据的提取
目前几乎所有GPS厂商都遵循美国国家海洋电子协会(National Marine Electronics Association)制定的NMEA-0183V20通信标准格式。TIM GPS接收机的输出语句按串行通信协议,数据格式为8个数据位、1个起始位、1个停止位,无奇偶校验。可以根据需要选择传输速率。其输出语句采用的是NMEA0183即ASCII格式码,输出语句达十多种,包括GGA、GSA、GSV、RMC、RMT、VTG等。这些定位数据语句不仅给出了位置、速度、时间等信息,而且指出当地的卫星接收情况。实际导航应用读取GPS的空间定位数据时,可以根据需要每隔几秒钟更新一次经纬度和时间数据。而更频繁的数据更新就没有必要了,而且不需要了解NMEA0183通信协议的全部信息,仅需要从中挑选出所需要的那部分定位数据。RMC数据设置描述如表1所示,其数据设置示例如下:
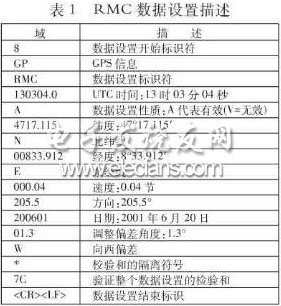
$GPRMC,130304.0,A,4717.115,N,00833.912,E,000.04,205.5,200601,01.3,W*7C
单片机提取GPS数据的流程图如图3所示。

2.3.2 TC35的AT指令控制
单片机对TC35进行初始化并通过AT指令控制短消息的收发。对短消息的控制有PDU模式和Text模式。Text模式不能发中文,所以本方案中采用PDU模式进行短消息的接收和发送。
首先对TC35进行初始化,设置短消息发送格式AT+CMGF=1,设置短消息中心AT+CSCA="+8613800531500"(短消息中心),设置短消息到达自动提示AT+CNM1=1,1,0,0,1.
发送短消息的过程:首先设置发送短消息的长度AT+CMGS=;等待TC35模块返回字符">",则可以将PDU数据输入;短消息发送成功后,模块返回OK.
接收短消息的过程:单片机接收到指令+CMT1:"SM",INDEX(信息存储位置),就开始读取PDU数据,AT命令为AT+CMGR=INDEX.
2.3.3 车载移动终端软件
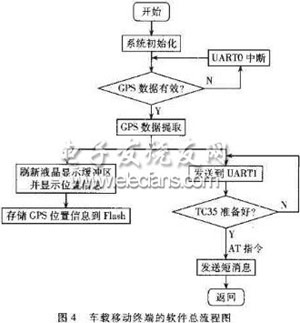
车载移动终端软件总流程图如图4所示。
本设计依据GPS全球定位系统、GSM公众网络以及通用的单片机技术,实现了车辆的定位监控。方案经过试验验证其技术可行,并且构成的系统成本低、应用范围广,为智能交通系统中的定位监控提出了一个较好的解决方法。
来源:互联网