
一、 概述
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
永磁无刷直流电机(Permanent Magnet Brushless DC Motor以下简称PMBLDC)由于其固有的特点,在家用消费类产品(空调、冰箱、洗衣机)和IT周边产品(打印机、软驱、硬驱)中得到广泛的应用。永磁无刷直流电机性能的发挥,除电机本身的设计以外,还要靠驱动技术和实现这一驱动技术的驱动板来保证。永磁无刷直流电机的驱动板又是连接上位控制MCU和电力电子变换器的桥梁:它接收上位机的命令,通过一定的控制方法,来达到预定的控制目标;同时把当前电机状态及一些基本参数返回给上位控制的MCU。由上述对PMBLDC驱动板应达到的功能可知,此类驱动板的核心器件应是带多路(6路以上)PWM输出的嵌入式微控制器。由于目前国内对INTEL MCS-51系列单片机的应用有了广泛基础,我们选用了完全采用8031核,最高时钟频率可达40MHz的Infineon C504嵌入式微控制器。
二、 C504的硬件驱动模式
C504在8031核的基础上,除了增加A/D转换等外围接口功能电路外,还增加了非常适合于电机控制的7路全数字PWM输出单元CCU(Capture/Compare Unit,捕捉比较单元)。CCU的功能框图如图1所示。当C504工作在硬件驱动模式时,cout3可以调制cc0,cout0,cc1,cout1,cc2,cout2上面,而且其输出的时序由INT0,INT1,INT2编码控制。
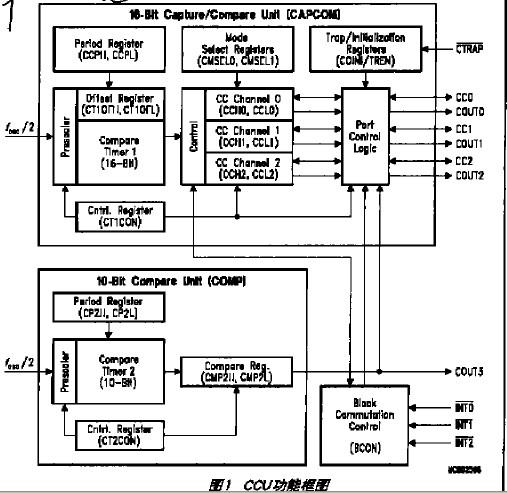
在图1中,左边的fosc/2是整个单元工作的时间基准;
CTRAP端可控制cc0-cout2输出端状态,处于CTRAP状态时cc0~cout2的状态可软件定义;
cc0-cout2端为3相6路16位PWM输出;
ccx和coutx(x=1,1,2)为互补信号,并且可以通过设置Offset RegiSTer的数值来控制其死区时间;
cout3是单路10 bit PWM输出端,而INT0~INT2是外部控制,通过INT0~INT2的编码来控制cc0~cout2的输出次序。
图2是C504使用在一台外转子的永磁无刷直流电机作为电动自行车的驱动电机时,工作在硬件模式下的电流波形。

这台样机现在已由杭州光阳机电技术有限公司投入生产。当用作电动车驱动的永磁无刷直流电机采用嵌入式微控制器控制时,可以实现平稳启动等一系列普通模拟控制器所无法实现的功能。
三、 C504的软件驱动模式
C504除了提供硬件驱动模式外,另外还提供了可以任意组合PWM输出的软件驱动动模式,如图3所示。

所讲任意组合有两层含义:
1)制的电机的相数可以选择,并可用不同的ccx和coutx(x=0,1,2)端;
2)控制的方法可以是一般的PWM,也可以是SPWM控制,这一点可以应用到PMBLDC的准正弦电流控制中。
图4是控制一台DCDD(DC Direct Drive)洗衣机的电流波形。从图中可以看出其电流波形已非常接近正弦,取得了良好的控制效果。
