
引言
目前,倒车已出现两种新技术: 超声波测距和后视摄像。
倒车雷达和后视摄像各有利弊,前者具有确切判断距离的优点,但对车后方的水沟、山崖、凸出的钢筋、竹杆等,超声波无法感应,这也是倒车安全上的死角;后者图像直观真实,但无法获得精确的距离。如何把两者的优点结合起来,消除两者的缺点是倒车多媒体可视测距终端解决的重点难题。
倒车多媒体可视测距终端运用了最新的超声波测距技术、字符产生和叠加技术、视频显示技术,实现了倒车测距和图像监视功能的组合,是一种用于检测车后物距和监视车后图像的电子设备,其有三大功能:
第一功能:超声波测距-------嵌入式超声波测距,使泊车测距精确。
第二功能:后视摄像系统------拍摄车后景物图像,直观无死角。
第三功能:车载电视------显示车后景物图像和车后障碍物距离,并可连接VCD\DVD,收看电视节目,提供娱乐休闲。
硬件电路设计
倒车多媒体可视测距终端由开关电源、超声波探头、超声波测距、OSD显示控制器、摄像探头、车载电视6部分组成(见图1),OSD显示控制器由微处理器W87E58、字符叠加器uPD6453、时钟芯片DS12C887、键盘、超声波测距接口电路CON4 、字符叠加接口CON2、RS-485接口电路、指示灯D1和D4、蜂鸣驱动电路S2和蜂鸣器U5驱动器以及切换电路组成。时钟芯片用于产生时间信号,通过并行总线进入CPU;超声波测距信号通过接口CON4进入CPU;字符叠加信号由CPU输出给字符叠加控制器,由字符叠加控制器完成时间、距离信息与视频的叠加。键盘用于时间的调整和功能设定;指示灯D1和D4用于指示工作状态;蜂鸣电路用于报警。
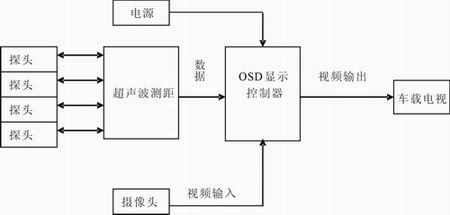
图1 倒车测距监视器组成框图
倒车多媒体可视测距终端工作原理为:将来自于汽车尾部保险杠安装的超声波信号接入OSD显示控制器,同时将视频监视子系统中的摄像探头信号接入OSD显示控制器,通过安装在汽车内部的OSD显示控制器的自动切换电路、字符叠加器 、微处理器,将OSD显示控制器的输出再接入监视器,这样实现自动切换图像、监视、超声波倒车测距、自动报警等功能。OSD显示叠加器使用了OSD专用芯片,来实现字符叠加:输入的视频信号先进行同步分离,分离出行、场同步信号作为OSD的基准信号,然后,OSD芯片输出红基色电压Vr、绿基色电压Vg、兰基色电压Vb信号进行编码,编码后产生的视频信号与输入的视频信号同步。两路视频信号进行高速切换,切换的键控脉冲是信号,即只要有字符信号,就切换到字符信号编码的视频信号上去,结果在输入的视频信号的图像上抠像,抠去部分由字符信号取代。
它的优点是:可安装在任何一种车辆上作倒车用。倒车时,司机不用打开车门,即可从监视器中清晰可见车后景物;CCD彩色或黑白广角摄像探头,角度为80°,水平距离为0.3~1.5米;后景是正像显示,无畸变,无几何失真;工作电压为DC12V,可与汽车电源共用。
系统软件设计
倒车多媒体可视测距终端的OSD显示控制器中采用微处理器W87E58,软件采用C语言编程。车后图像和测距数据流向如图2所示。

图2 信息流程图
限于篇幅,程序代码就不在这里详述了。
结语
本倒车测距多媒体终端具备的功能强,测距准确,已经开发成功并运用在车辆中。