
蓝牙是一个开放性的、短距离无线通信技术标准。其功率放大器是蓝牙无线发射机中功耗最大的模块,为了降低蓝牙系统功耗,延长电池寿命,要求它实现2~8 dBm的输出功率步进。当前商用功放主流的功率控制电路主要有两类,直接闭环控制型和间接闭环控制型。由于间接闭环控制方法具有集成度高,成本低的特点而被广泛采用。考虑到集成度、成本等因素,文献没有对输出功率检测,而是通过预测输出功率等级所对应的电源电压大小,再通过采用稳压器的结构,控制电源电压间接实现功率控制的。
电路刚启动时,如果稳压器启动时产生较大的电容或VMP管导通时有较小的电阻,浪涌电流就会很大,有时会接近稳压器的电流限值,因此必须加以限制。
1 蓝牙功放功率控制电路原理分析
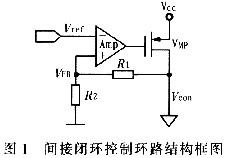
间接闭环控制环路如图1所示,该控制环路包括一个误差放大器,反馈环路和调整管(VMP管)。工作原理是由误差放大器将输出反馈电压VFB与参考电压Vref进行比较,并放大其差值(Vref-VFB)以此来控制调整管(VMP)的导通状态,实现负反馈,从而得到稳定的输出Vcon。电路刚启动时,反馈电压VFB很低,如果稳压器启动时产生较大的电容(或者负载电容很大)或VMP管导通时有较小的电阻,浪涌电流(即流过VMP管的瞬间电流)就会很大,有时会接近稳压器的电流限值。因此,必须在误差放大器中设计软启动电路,以保证整个电路在上电后进入正常的直流偏置状态,不会产生浪涌电流。
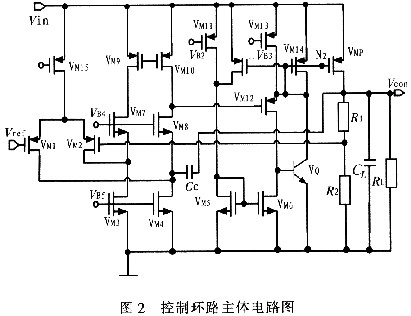
闭环控制系统的主体电路如图2所示,VM1~VM8组成折叠式的误差放大器,VM9~VM10组成单级的电流镜作为负载,这样做的好处就是采用10 pF左右的补偿电容就可以使系统达到稳定。VM5~VM14和VQ组成级间缓冲级。R1和R2组成反馈网络,其中

由于N2节点(VMP管栅极)的输出阻抗很小,因此在导通的瞬间N2节点的寄生电容在很短的时间内完成放电,N2节点的电压由高变为低。这样会导致有一个很大的浪涌电流流过PMOS调整管,高达1.45 A,该电流对系统的性能影响很大,例如,如果输入端会存在一个寄生电阻,因此瞬态电流会引起一个较大的压降差,导致系统不能正常工作,同时也会增加系统噪声,因此有必要加以限制。
2 软启动电路设计
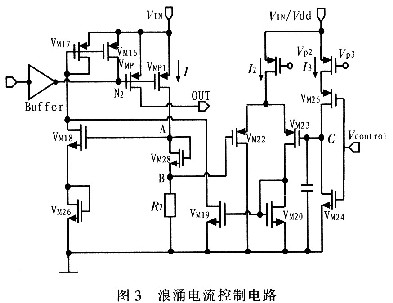
由上面分析可知,由于N2节点电压迅速变化,导致大的浪涌电流流过P功率管(VMP管)。因此只需要控制N2节点电压的变化就可以实现电流的控制,控制该浪涌电流变化无非就是控制其变化的斜率和峰值。其具体的电路原理图包括两个部分,即浪涌电流的斜率控制部分和峰值控制部分。具体的实现电路如图3所示。
2.1 浪涌电流斜率的控制
晶体管VM22和VM23构成差分对,VM16和VM17,VM18,VM19,VM20,VM28和R2构成负反馈环路,因此B节点电压会随着C节点电压上升而上升,最终B、C节点的电压值将相等。
当VM25截止,VM24导通,即控制端Vcontrol的输入电压为高电平时,电容C1电压为0 V;当Vm25导通,Vm24截止,即控制端Vcontrol的输入电压为低电平时,电流源I3将对电容充电。此时C节点的电压Vc=I3t/C,假设流过VMP1管的电流为I,那么B节点的电压为VB=IR2,又因为VC=VB,所以,I=I3×t/R2C。功率管VMP管与VMP1管构成电流镜,因此间接实现了对浪涌电流的线性控制。
2.2 浪涌电流峰值的控制
因为VA=IR2+VGS(M28),当VA的电压大于VM18的阈值电压与VGS(M26)之和,VM18将导通;注意到VM16,VM17,VM18,VMP1组成负反馈环路,因此最终环路达到稳定,电流I将被控制在一定值,同样间接实现了对电流峰值电流的控制,最大值由R2、VM28、VM26、VM18确定。
3 仿真结果与讨论
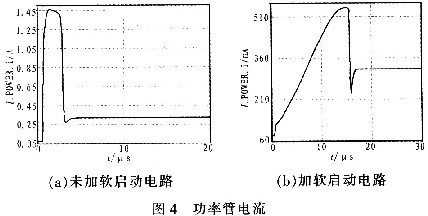
图4为系统刚启动时,流过功率管VMP管的电流,图4(a)为没有加软启动电路时,流过P功率管的瞬态电流,其峰值电流高达1.45 A。图4(b)表明软启动电路分别从斜率和峰值成功地控制了瞬态电流,其峰值仅为520 mA,上升的斜率几乎是一恒定值,不过这会增加系统的响应时间。因此可以根据应用系统的其他要求确定浪涌电流的斜率和峰值。
4 结论
针对蓝牙功率放大器的功率控制电路在启动时产生的浪涌电流现象,分别从浪涌电流的峰值和上升的斜率两方面着手,设计出了一个新颖的浪涌电流控制电路,具有结构简单等优点;同时分别分析了浪涌电流斜率和峰值的控制的原理,最终实现了对浪涌电流的控制,成功实现了软启动。