
现代电子战环境日趋复杂,信号日趋密集,新体制雷达不断出现,雷达信号的各个参数以各种规律变化,因而从密集复杂的信号环境中分选和识别各种新体制雷达信号就成了电子战信号处理的一大难题。为了满足电子支援措施(ESM)实时信号分选的需要,对处理器的处理时间提出了较高的要求:不仅要求处理器的硬件结构具有良好的设计和可不断优化的空间,而且要求器件有较高的集成性,这些已成为不可忽视的因素。经过对相关器件的深入分析和研究,本文采用高速现场可编程门阵列器件(FPGA)替代中小规模集成芯片来设计三参数关联比较器,从而实现预分选器设计。
1 基于关联比较器的信号预分选原理
关联比较器技术对高密度信号环境下的硬件预分选有着积极和重要的意义。关联比较器用于信号预分选的思路源于传统信号处理方法中的辐射源参数匹配方法。目前,电子战系统中对雷达信号实时分选可利用的信息仍然是雷达信号的五大参数:载频(RF)、脉宽(PW)、到达方位(DOA)、到达时间(TOA)、脉幅(PA)。其中RF一般集中在若干离散的频率点上,聚敛性好,因此是侦察信号处理中最重要的特征之一;DOA取决于雷达和侦察机的相对方位角,当雷达与侦察机之间没有相对运动时,DOA为常数,存在相对运动时,DOA变化缓慢,该参数不受雷达信号本身影响,也是侦察信号处理中最重要的特征之一;由于雷达信号PW本身比较稳定,数值分布较集中,具有很好的平稳性和聚敛性,因此也可以作为分选特征之一;由于影响PA的因素太多,使PA的平稳性较差,可信度不高,一般不作为分选依据;而TOA一般作为主处理器的主要分选、识别参数,一般也不作为预处理分选依据。因此从理论上讲预处理可利用的有3个参数:RF,PW,DOA。
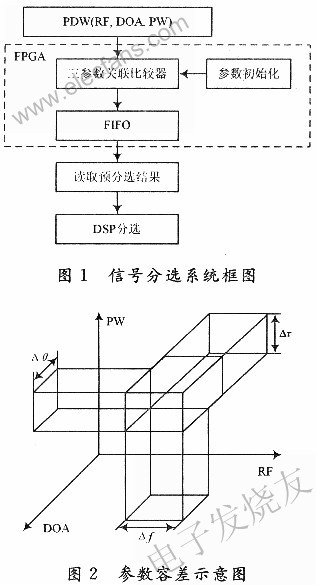
分选系统的框图如图1所示,脉冲分选分为预分选和主分选两部分,预分选为RF,PW,DOA三参数联合分选,由FPGA完成;主分选为重频(PRI)分选,由DSP完成。
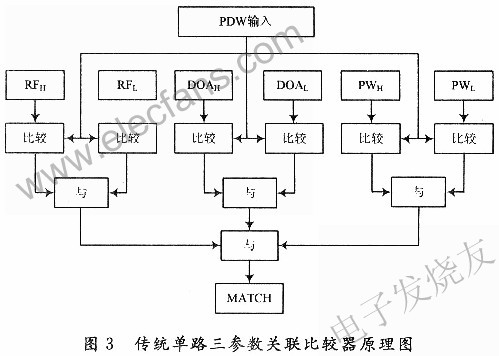
根据RF,PW,DOA构成的三参数关联比较器原理如图2所示。每部雷达信号在空间占据一个小盒,小盒的中心坐标可以认为是雷达参数,小盒的尺寸取决于参数容差,这与接收机的测量精确度有关。只要测量达到一定精确度,选取合适的容差范围,就可以对此小盒内的脉冲进行去交错,最后确定脉冲序列的存在。
2 关联比较器的设计
由于辐射源特征的多样性以及脉冲参数测量误差的引入,使雷达截获系统脉冲去交错存在以下两方面的问题:
(1)由于参数抖动或存在测量误差,使得参数是一个由上下门限界定的一个范围。
(2)由于存在参数捷变或参数分集,使得参数存在多值(如频率捷变、分集等)。
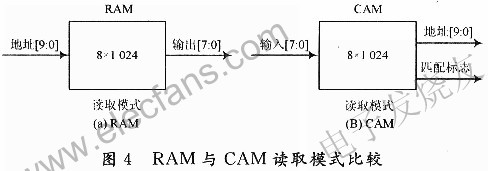
传统的关联比较器的原理图如图3所示,这种方法是给每个参数设定一个容差,将每个脉冲的PDW与各参数容差进行比较,实际上就是与RF,DOA,PW的最大值与最小值做比较,如果都落在容差范围内,则产生相应路数的单路匹配信号MATCH。这种方法能够解决第一个问题,但是对于参数捷变雷达则不能进行分选。另外,由于每一路只能配置一组雷达参数,对于日益复杂的电磁环境,这种方法已不适应。
本文在传统的关联比较器上进行改进,设计了基于CAM(Content.Addressable Memory)的关联比较器。CAM是一种专门为快速查找数据地址而设计的存储器,通过把输入数据与其内所存数据同时相比较,能快速确定输入数据是否与其内部某个数据或几个数据相匹配。CAM的数据寻址方式因不同应用要求而不同,最快方式下仅需要一个时钟周期便可完成对所有数据的寻址。
与RAM一样,CAM也是采取阵列式数据存储,其数据的写入方式与RAM相类似,但CAM的数据读取方式却不同。在RAM中,输入的是数据地址,输出的是数据,而在CAM中输入的是所要查询的数据,输出的是数据地址和匹配标志。
在RAM中,RAM的存储容量由地址线宽度所确定。例如,10b宽地址总线的RAM存储容量为210=1024B,CAM却没有这个限制,因为它不是采用传统的通过地址读取数据的方式。如要从1024B中查询某一数据,输入数据宽度为8b,若数据存在,则输出匹配标志和10b宽的数据地址。因为CAM不是采用传统的地址线模式读取数据,存储空间可以很容易的扩展,输入数据线宽度只由需查询的数据位数决定。图4为数据读取模式下的RAM和CAM。
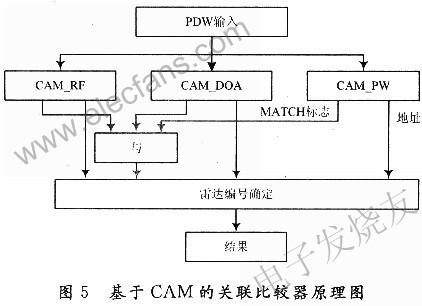
基于CAM的关联比较器原理如图5所示,三个CAM中分别存储了多部雷达的RF,DOA,PW参数。当PDW进来时,如果CAM中有与之匹配的参数,则MATCH标志位输出1,并输出参数地址,根据输出三个CAM输出的地址和MATCH标志位判定辐射源编号。同传统方法一样,这种方法也可以进行多路组合,实现对PDw的高速处理。
3 基于CAM的关联比较器的FPGA实现
本文使用的FPGA为Xilinx公司Virtex 4系列的XC4VSX55。ISE11.1为用户提供了CAM版本为6.1的IP核,其配置界面如图6所示。
3.1 地址匹配类型
CAM输出地址匹配类型有三种配置,默认为binary encoded,也就是输出匹配的地址信息。另外,也可以配置成single-match unencoded和multi-match unencoded,这两种模式输出的就是一个位数与CAM内数据个数相同的二进制编码,与之匹配的位为1,其余为0。例如,CAM中有8个数据,输入的数据与第3个数匹配,则输出00100000。
3.2 三态模式
标准三态模式是指写入CAM的内容可以为1,O和X,X是指不关心的位,任何值与X比较的结果都是认为是匹配的,比如与10X1匹配的内容为1011,1001。增强三态模式比标准模式多了一个U,U和X刚好相反,指的是任何值与U比较的结果都是认为是不匹配的。
经过对CAM核的分析,三态模式中X的引入可以实现一对多的匹配,这样CAM中的一个值不但可以对应容差范围内的多个值,也可以对应参数捷变雷达的中参数的多个值。例如,雷达的频率参数范围是01111100b≤RF≤01111111b,CAM中只要预存二进制数011111XX就可以实现。利用这个原理,本文使用Active-HDL 8.2软件在FPGA中实现了预分选器的设计。
对CAM和RAM单元的初始化数据写入既可预先初始化,也可在系统工作过程中实时更新。在雷达信号预分选应用中可将已知辐射源库利用初始化内存文件对CAM和RAM进行初始化。对未知辐射源参数可在系统工作过程中实时动态写入。
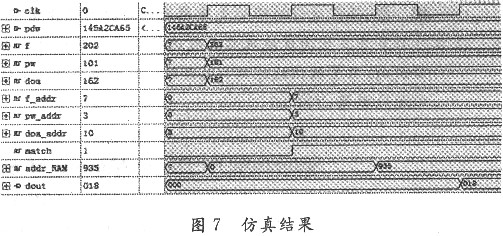
图7为在Active-HDL8.2中的仿真图,从输入的PDW可以得到PW=101,DOA=162,RF=202,三个参数分别进入相应的CAM中得到匹配结果和匹配标志,最终得到与编号为18的雷达匹配。
4 结语
基于CAM的关联比较器在雷达信号预分选中具有重要意义,能够极大地提高信号分选的速度,为后端处理节省更多的时间。本系统在FPGA内设计了基于CAM的关联比较器,实现了雷达信号的快速预分选,达到了实时性和可靠性的要求。