风力发电场具有机组布置范围广阔,设备运行的自然环境恶劣等特点,WPCS风电控制系统专为大型风力发电机组而设计,产品集成了当代最先进的电力电子、微电子、网络和软件技术,系统的网络结构如下:
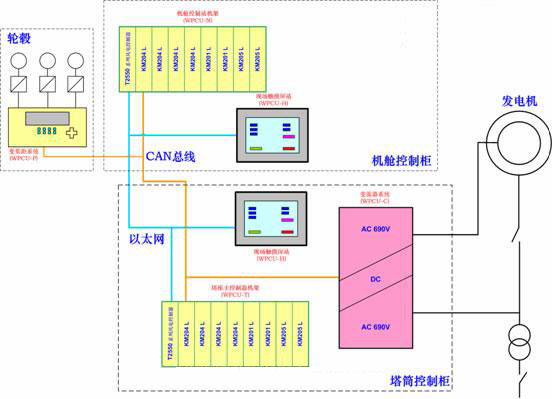
风电控制系统网络结构图
WPCS风电控制系统包括现场风力发电机组控制单元、高速环型冗余光纤以太网、远程上位机操作员站等部分。现场风力发电机组控制单元是每台风机控制的核心,实现机组的参数监视、自动发电控制和设备保护等功能;每台风力发电机组配有就地HMI人机接口以实现就地操作、调试和维护机组;高速环型冗余光纤以太网是系统的数据高速公路,将机组的实时数据送至上位机界面;上位机操作员站是风电厂的运行监视核心,并具备完善的机组状态监视、参数报警,实时/历史数据的记录显示等功能,操作员在控制室内实现对风场所有机组的运行监视及操作。
风力发电机组控制单元(WPCU)是每台风机的控制核心,分散布置在机组的塔筒和机舱内。由于风电机组现场运行环境恶劣,对控制系统的可靠性要求非常高,而WPCS风电控制系统是专门针对大型风电场的运行需求而设计,具有极高的环境适应性和抗电磁干扰等特点,其系统结构如下:
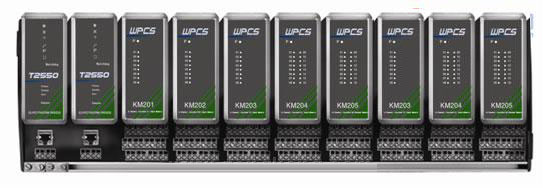
WPCU-T2550系列
WPCS风电控制系统的现场控制站包括:塔座主控制器机架、机舱控制站机架、变桨距系统、变流器系统、现场触摸屏站、以太网交换机、现场总线通讯网络、UPS电源、紧急停机后备系统等。
1、塔座控制站(WPCU-T)
塔座控制站即主控制器机架是风电机组设备控制的核心,主要包括控制器、I/O模件等。
控制器硬件采用32位POWERPC处理器,系统软件采用强实时性的Vxworks操作系统,运行机组的各类复杂主控逻辑通过现场总线与机舱控制器机架、变桨距系统、变流器系统进行实时通讯,以使机组运行在最佳状态。
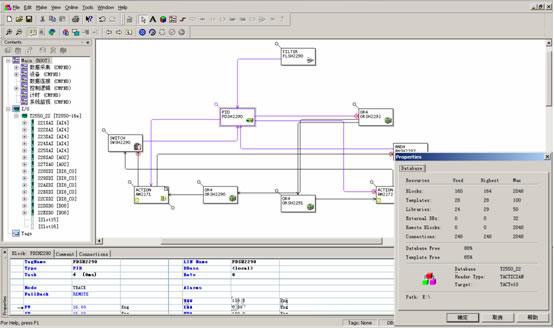
控制器的组态采用功能丰富、界面友好的KTOOLS组态软件,采用符合IEC61131-3标准的组态方式,包括:功能图(FBD)、指令表(LD)、顺序功能块(SFC)、梯形图、结构化文本等组态方式。

2、机舱控制站(WPCU-N)
机舱控制站采集机组传感器测量的温度、压力、转速以及环境参数等信号,通过现场总线和机组主控制站通讯,主控制器通过机舱控制机架以实现机组的偏航、解缆等功能,此外还对机舱内各类辅助电机、油泵、风扇进行控制以使机组工作在最佳状态。
3、变桨距系统(WPCU-P)
大型MW级以上风电机组通常采用液压变桨系统或电动变桨系统。变桨系统由前端控制器对3个风机叶片的桨距驱动装置进行控制,其是主控制器的执行单元,采用CANOPEN与主控制器进行通讯,以调节3个叶片的桨距工作在最佳状态。变桨系统有后备电源系统和安全链保护,保证在危急工况下紧急停机。
4、变流器系统(WPCU-C)
由于电力电子元件的性能不断提高,价格不断下降,大型风力发电机组目前普遍采用大功率的变流器以实现发电能源的变换,变流器系统通过现场总线与主控制器进行通讯,实现机组的转速、有功功率和无功功率的调节。
5、现场触摸屏站(WPCU-H)
现场触摸屏站是机组监控的就地操作站,实现风力机组的就地参数设置、设备调试、维护等功能,是机组控制系统的现场上位机操作员站。
6、以太网交换机(HUB)
系统采用工业级以太网交换机,以实现单台机组的控制器、现场触摸屏和远端控制中心网络的连接。现场机柜内采用普通双绞线连接,和远程控制室上位机采用光缆连接。
7、现场通讯网络
主控制器具有CANOPEN、PROFIBUS、MODBUS、以太网等多种类型的现场总线接口,可根据项目的实际需求进行配置。
8、UPS电源、后备危急安全链系统
UPS电源用于保证系统在外部电源断电的情况下,机组控制系统、危急保护系统以及相关执行单元的供电。
后备危急安全链系统独立于计算机系统的硬件保护措施,即使控制系统发生异常,也不会影响安全链的正常动作。安全链是将可能对风力发电机造成致命伤害的超常故障串联成一个回路,当安全链动作后将引起紧急停机,机组脱网,从而最大限度地保证机组的安全。
所有风电机组通过光纤以太网连接至主控室的上位机操作员站,实现整个风场的远程监控,上位机监控软件具有如下功能:
① 系统具有友好的控制界面。在编制监控软件时,充分考虑到风电场运行管理的要求,使用汉语菜单,使操作简单,尽可能为风电场的管理提供方便。
② 系统显示各台机组的运行数据,如每台机组的瞬时发电功率、累计发电量、发电小时数、风轮及电机的转速和风速、风向等,将下位机的这些数据调入上位机,在显示器上显示出来,必要时还可以用曲线或图表的形式直观地显示出来。
③ 系统显示各风电机组的运行状态,如开机、停车、调向、手/自动控制以及大/小发电机工作等情况,通过各风电机组的状态了解整个风电场的运行情况。
④ 系统能够及时显示各机组运行过程中发生的故障。在显示故障时,能显示出故障的类型及发生时间,以便运行人员及时处理及消除故障,保证风电机组的安全和持续运行。
⑤ 系统能够对风电机组实现集中控制。值班员在集中控制室内,只需对标明某种功能的相应键进行操作,就能对下位机进行改变设置状态和对其实施控制。如开机、停机和左右调向等。但这类操作有一定的权限,以保证整个风电场的运行安全。
⑥ 系统管理。监控软件具有运行数据的定时打印和人工即时打印以及故障自动记录的功能,以便随时查看风电场运行状况的历史记录情况。
WPCS风电控制系统具有以下基本功能:
(1)数据采集(DAS)功能:包括采集电网、气象、机组参数,实现控制、报警、记录、曲线功能等;
(2)机组控制功能:包括自动启动机组、并网控制、转速控制、功率控制、无功补偿控制、自动对风控制、解缆控制、自动脱网、安全停机控制等;
(3)远程监控系统功能:包括机组参数、相关设备状态的监控,历史和实时曲线功能,机组运行状况的累计监测等。
1、数据采集(DAS)功能
机组运行过程中进行监测的相关参数包括:
(1)电网参数,包括电网三相电压、三相电流、电网频率、功率因数等。电压故障检测:电网电压闪变、过电压、低电压、电压跌落、相序故障、三相不对称等。
(2)气象参数,包括风速、风向、环境温度等。
(3)机组状态参数检测,包括:风轮转速、发电机转速、发电机线圈温度、发电机前后轴承温度、齿轮箱油温度、齿轮箱前后轴承温度、液压系统油温、油压、油位、机舱振动、电缆纽转、机舱温度等。
风电场远程监控中心的上位机和塔座触摸屏站均可实现机组的状态监视,实现相关参数的显示、记录、曲线、报警等功能。
2、机组启停、发电控制
(1)主控系统检测电网参数、气象参数、机组运行参数,当条件满足时,启动偏航系统执行自动解缆、对风控制,释放机组的刹车盘,调节桨距角度,风车开始自由转动,进入待机状态。
(2)当外部气象系统监测的风速大于某一定值时,主控系统启动变流器系统开始进行转子励磁,待发电机定子输出电能与电网同频、同相、同幅时,合闸出口断路器实现并网发电。
(3)风力机组功率、转速调节
根据风力机特性,当机组处于最佳叶尖速比λ运行时,风机机组将捕获得最大的能量,虽理论上机组转速可在任意转速下运行,但受实际机组转速限制、系统功率限制,不得不将该阶段分为以下几个运行区域:即变速运行区域、恒速运行区域和恒功率运行区。额定功率内的运行状态包括:变速运行区(最佳的λ)和恒速运行区。
当风机并网后,转速小于极限转速、功率低于额定功率时,根据当前实际风速,调节风轮的转速,使机组工作在捕获最大风能的状态。
由于风速仪测量点的风速与作用于桨叶的风速存在一定误差,所以转距观测器来预测风力机组的机械传动转距,在通过发电机转速和转距的对应关系推出转速。
ω为发电机转速期望值。
Tm为转距的观测值。
Kopt为最佳转速时的比例常数。
当风速增加使发电机转速达上限后,主控制器需维持转速恒定,风力机组发出的电功率,随风速的增加而增加,此时机组偏离了风力机的最佳λ曲线运行。
当风速继续增加,使转速、功率都达到上限后,进入恒功率运行区运行,此状态下主控通过变流器,维持机组的功率恒定,主控制器一方面通过桨距系统的调节减少风力攻角,减少叶片对风能的捕获;另一方面通过变流器降低发电机转速节,使风力机组偏离最佳λ曲线运行,维持发电机的输出功率稳定。
3、风电控制系统辅助设备逻辑
(1)发电机系统
监控发电机运行参数,通过3台冷却风扇和4台电加热器,控制发电机线圈温度、轴承温度、滑环室温度在适当的范围内,相关逻辑如下:
当发电机温度升高至某设定值后,起动冷却风扇,当温度降低到某设定值时,停止风扇运行;当发电机温度过高或过低并超限后,发出报警信号,并执行安全停机程序。
当温度越低至某设定值后,起动电加热器,温度升高至某设定值后时,停止加热器运行;同时电加热器也用于控制发电机的温度端差在合理的范围内。
(2)液压系统
机组的液压系统用于偏航系统刹车、机械刹车盘驱动。机组正常时,需维持额定压力区间运行。
液压泵控制液压系统压力,当压力下降至设定值后,启动油泵运行,当压力升高至某设定值后,停泵。
(3)气象系统
气象系统为智能气象测量仪器,通过RS485口和控制器进行通讯,将机舱外的气象参数采集至控制系统。
根据环境温度控制气象测量系统的加热器以防止结冰。
闪光障碍灯控制,每个叶片的末端安装闪光障碍灯,在夜晚点亮。
机舱风扇控制机舱内环境温度。
(4)电动变桨距系统
变桨距系统包括每个叶片上的电机、驱动器、以及主控制PLC等部件,该PLC通过CAN总线和机组的主控系统通讯,是风电控制系统中桨距调节控制单元,变桨距系统有后备DO顺桨控制接口。桨距系统的主要功能如下:
紧急刹车顺桨 系统控制,在紧急情况下,实现风机顺桨控制。
通过CAN通讯接口和主控制器通讯,接受主控指令,桨距系统调节桨叶的节角距至预定位置。
桨距系统和主控制器的通讯内容包括:
桨叶A位置反馈
桨叶B位置反馈
桨叶C位置反馈
桨叶节距给定指令
桨距系统综合故障状态
叶片在顺桨状态
顺桨命令
(5)增速齿轮箱系统
齿轮箱系统用于将风轮转速增速至双馈发电机的正常转速运行范围内,需监视和控制齿轮油泵、齿轮油冷却器、加热器、润滑油泵等等。
当齿轮油压力低于设定值时,起动齿轮油泵;当压力高于设定值时,停止齿轮油泵。当压力越限后,发出警报,并执行停机程序。
齿轮油冷却器/加热器控制齿轮油温度:当温度低于设定值时,起动加热器,当温度高于设定值时停止加热器;当温度高于某设定值时,起动齿轮油冷却器,当温度降低到设定值时停止齿轮油冷却器。
润滑油泵控制,当润滑油压低于设定值时,起动润滑油泵,当油压高于某设定值时,停止润滑油泵。
(6)偏航系统控制
根据当前的机舱角度和测量的低频平均风向信号值,以及机组当前的运行状态、负荷信号,调节CW(顺时针)和CCW(逆时针)电机,实现自动对风、电缆解缆控制。
自动对风:当机组处于运行状态或待机状态时,根据机舱角度和测量风向的偏差值调节CW、CCW电机,实现自动对风。(以设定的偏航转速进行偏航,同时需要对偏航电机的运行状态进行检测)
自动解缆控制:当机组处于暂停状态时,如机舱向某个方向扭转大于720度时,启动自动解缆程序,或者机组在运行状态时,如果扭转大于1024度时,实现解缆程序。
(7)大功率变流器通讯
主控制器通过CANOPEN通讯总线和变流器通讯,变流器实现并网/脱网控制、发电机转速调节、有功功率控制、无功功率控制:
并网和脱网:变流器系统根据主控的指令,通过对发电机转子励磁,将发电机定子输出电能控制至同频、同相、同幅,再驱动定子出口接触器合闸,实现并网;当机组的发电功率小于某值持续几秒后或风机或电网出现运行故障时,变流器驱动发电机定子出口接触器分闸,实现机组的脱网。
发电机转速调节:机组并网后在额定负荷以下阶段运行时,通过控制发电机转速实现机组在最佳λ曲线运行,通过将风轮机当做风速仪测量实时转距值,调节机组至最佳状态运行。
功率控制:当机组进入恒定功率区后,通过和变频器的通讯指令,维持机组输出而定的功率。
无功功率控制:通过和变频器的通讯指令,实现无功功率控制或功率因数的调节。
(8)安全链回路
安全链回路独立于主控系统,并行执行紧急停机逻辑,所有相关的驱动回路有后备电池供电,保证系统在紧急状态可靠执行。
