
1 引言
运动控制系统的上位控制方案一般有单片机系统、专业运动控制PLC、专用控制系统和“PC+运动控制卡”。采用单片机系统实现运动控制,成本较低,但开发难度较大,周期长。这种方案一般适用于产品批量较大、控制系统功能简单、有单片机系统开发经验的用户。许多品牌的PLC都可选配定位控制模块,有些PLC的CPU单元本身就具有运动控制功能,如松下公司的FP0。这种方案一般适用于运动过程比较简单、运动轨迹固定的设备,如送料器、自动焊机等。专用控制系统一般是针对专用设备或专用行业,比如西门子公司的车床数控系统和铣床数控系统等。“PC+运动控制卡”的方案随着PC的普及用得越来越多,将是运动控制系统的主要发展趋势。这种方案可充分利用计算机资源,用于运动过程、机械轨迹都比较复杂,而且柔性比较强的机器设备,比如目前很热门的开放式数控系统大多采用这种方案。
本文介绍的控制系统采用的就是“PC+运动控制卡”方案,这是本文的主要内容。
2 系统组成及硬件介绍
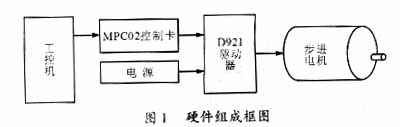
图1示出本系统的硬件组成框图。其中采用德国百格拉三相混合式步进电机(VRDM3910/LHA)及其配套驱动器(D921)。控制卡是成都步进机电有限公司生产的MPC02型运动控制卡。
2.1 驱动器面板及其功能设置
图2是D921型驱动器的面板配置及功能。

功能选择:STEP1、STEP2 设置电机每转步数;
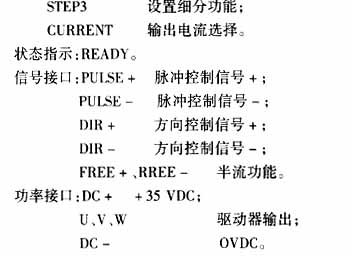
所有输入信号均为光耦输入。
2.2 运动控制卡的结构
MPC02型运动控制卡的结构如图3所示。
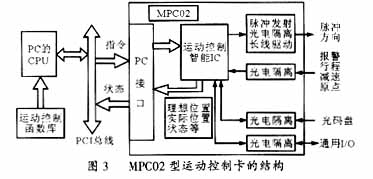
该卡插在PC的PCI扩展槽内使用;MPC02卡完成运动控制的所有细节,包括脉冲和方向信号的输出、自动升降速的处理、原点和限位信号的检测等。它采用先进的专用控制集成电路,具有梯形及S形升降速度曲线。使用68芯SISC接口,外接线可采用屏蔽线缆,以提高控制卡的抗干扰能力。其信号接口定义如下:
脉冲量信号:脉冲/方向(编号17~28);编码器反馈(35~52);光隔电源(29、30)。
开关量信号:限位(55、56、60、61、65、66);减速(53、54、58、59、63、64);原点(57、62、67);伺服使能(9、11、13);偏差清零(10、12、14);外部报警(68);通用输入(31~34);通用输出(1~8);光隔电源(15、16)。
3 运动控制系统的软件
3.1 控制卡的软件
在函数库中使用的单位和函数返回值通常约定如下。
3.1.1 单位
1)位移或距离的单位为P(Pulse),即脉冲数;
2)速度的单位是P/S(Pulse/sec),即脉冲/秒;
3)加速度和减速度的单位是P/s2(Pulse/s2),即脉冲/秒2。
3.1.2 函数返回值
运动库中的大多数函数是整型函数,它们的返回意义如下:
0 函数执行正确;-1 函数执行错误。
在函数库中使用的函数有如下几种:控制卡和轴设置函数、独立运动和插补运动函数、制动函数、位置和状态的设置及查询函数、I/O口操作函数、错误代码函数和一些其他函数。这些函数实现的运动有如下六种基本类型,如图4所示。
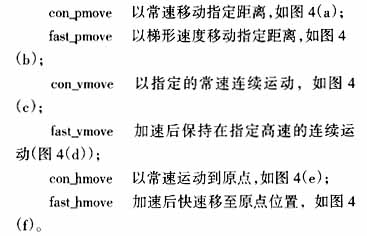
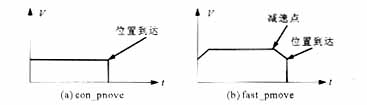
把带有升/降速控制的运动函数称为快速(fast)运动函数,比如fast_pmove、fast_vmove和fast_hmove,把常速运动函数称为常速(con)运动函数,如con_pmove、con_vmove和con_hmove。
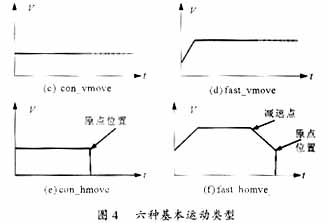
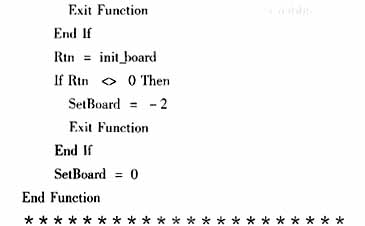
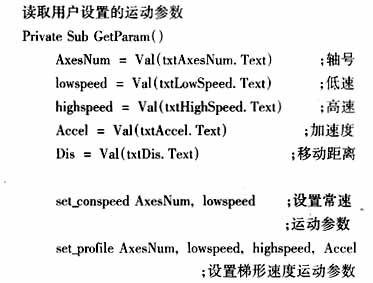
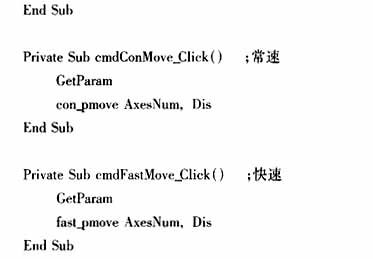
3.2 软件程序:
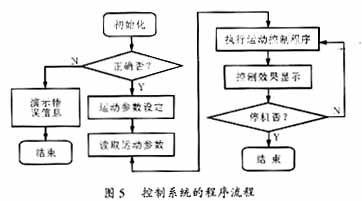
运动参数设定包括轴号、初速度、最高速度、加速度和移动距离等;运动控制程序包括急停、缓停、清零、常速和快速等;控制效果显示包括位置和速度等。程序如下:

4 结束语
以专用运动控制电路为主控的运动控制卡的运动控制功能由硬件电路实现,集成度高,可靠性比较好。它只需从微机接收控制命令,然后自己完成与运动有关的控制,几乎不占用微机的CPU时间,使用非常方便,不仅可以大大缩短研制和开发周期,而且还能实现更完善的运动控制系统,能够满足对步进电机的控制要求。