
在锂电池生产中的生产过程中,要把成品从生产线上自动取下来,送到检测处通过智能图像处理系统进行外观检验,然后把合格产品送入特定的包装容器内,把不合格的产品送入另一容器内。这是欧洲最大的电池生产厂家Sonnenschein在电池生产中包装前的最后一个环节,而在整个电池生产过程中有部分工位应用的是百格拉的码垛机器人。尽管这些机器人所完成的功能不完全一样,但采用相同的拖盘,便于不同工位产品的流通和通用。本文就以最后外观检测所用机器人和视觉系统为例进行简单的介绍。
一 供料机构的组成及工作过程
图1给出了一个标准的批量供货机构原来图,它由拖盘摞升降部分,拖盘水平运动部分和一个二维XZ机器手组成。图1的例子中拖盘摞升降部分共有八个拖盘,实际上一摞有14个小拖盘。由直线运动单元带动上下任意精确运动。工作时把最顶部第一个拖盘升高到比水平运动轴高出一定高度后停止,然后水平轴向第一个托盘运动,使所带的拖板处于第一个拖盘下面。然后升降轴下降使第一个拖盘处于水平轴的拖板上。然后升降轴升高10mm, 接着水平轴向回运动把该托盘带到二维XZ机器手前面。XZ二维机器手先逐个搬运第一排的零件,搬运后处理完再放回原处。当一排零件被处理完后,水平运动轴再向前运动使第二排的零件处于机器手可以抓取的位置上。如此类推直到处理完最后一排的零件后,水平运动轴再把该托盘送回到升降轴的原来位置。然后处理下一个托盘的零件,如此进行下去,直到处理完最后一个托盘上的全部零件。
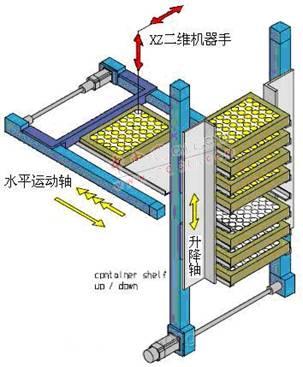
图 1: 原理性结构示意图
零件检测机器人" src="http://files.chinaaet.com/images/20101228/375e9eb1-3246-4383-8efc-32f54eb9571e.jpg" />
图2: 为Sonnenschein制做的零件检测机器人
二 机器人型号及参数
图 2所示的供料系统一次最多有14个托盘。每个托盘的尺寸是320*250*35mm,装有100个电池,每个电池的重量为10克。采用一次抓5个电池的吸盘手爪,平均每5秒完成一次五个零件的搬运,检测和放回托盘内。每交换一次托盘用时4秒,每个运动部分的重服定位精度为0.1mm。
升降轴采用两根PAS42BB组成的龙门式结构,最大负重可达80公斤。水平运动轴采用两根PAS41BR,最大负重可达20公斤。XZ二维机器人的X轴采用PAS42BB,而Z轴采用LM-A41BB。运动速度高达60米/分钟。手爪为吸盘,一次抓住五个零件。
三 视觉系统简介
视觉检测系统采用德国VC公司的智能相机VC4466C彩色智能相机,配CCD传感器,分辨率是1024*768像素,逐行扫描输出信号,每秒输出20帧图像。曝光时间从5us到20s,可以软件设置。采用TI公司DSP,每秒可以执行的操作为8000MIPS(=每秒百万次操作)。配4MB闪存和64MB 数据储存器。带有4路可编程输入口和4路可编程输出口,1个RS232接口,带有SXGA视频输出和可选以太网输出接口。其整体体积为 110*50*35mm,整体重量250克,24VDC供电。
采用模板匹配算法来快速检验电池的下面数据:
1、表面颜色一致性否,
2、图案有无不清楚,不完整的地方,
3、文字有无错误。
采用示教方法把表面合格的电池摄取下来作为标准模板,然后每次把所照到电池的图像进行对比,从而实现上面的检测功能。VC4466C彩色智能相机的优点是在相机曝光读取一幅新图像时不占用DSP资源,DSP可以用来完成模板匹配处理工作。采集一幅图像的时间为50ms,而完成一次模板匹配的时间是 100ms。所有一个智能相机系统就可以完成5个电池的检测工作。有关VC智能相机及处理软件方面的详细资料请与李刚联系(shenyangligang@163.com)。
四 控制系统及减速机
整个机器人系统采用百格拉公司TLCC CAN总线控制系统,通过CANBus控制各个轴的运动。TLCC根据来自VC4466C智能相机的检测结果来把电池放回原处,或放到不合格产品箱内。各种运动轴全部采用TLC5系列智能驱动器,它接收来自TLCC的运动命令。各个轴所配的行星减速机是德国Neugart公司的PLE系列精密行星减速机。整个系统采用4个PLE系列精密行星减速机和4个可编程,带运动控制功能的智能伺服驱动器系统TLC534。
五 结束语
本文介绍了对大批量供料机器人的结构及工作过程。由直角坐标机器人组成的上料下料,搬运机器人适用于很多种应用,而且比其它结构的机器人成本低,效率高,在欧洲被广泛应用于化妆品、食品、手机、传感器、玩具、仪表等生产中。上面仅为一种结构形式的上料下料机器人,我们还有10多种其他结构的上料下料机器人,百格拉公司二十年来生产了数千台套类似的机器人。