0 引言
随着新材料市场的需求, 各种用于新型合金材料表面处理的新工艺和与之相适应的电源技术也得到了迅猛发展。这些新工艺往往对电源的输出波形有特殊要求,且在高压、大电流的大功率输出工况下要求电源的主要参数能够随着工艺过程的进展大范围地连续调节, 这不仅给电源主电路的设计带来了相当的难度, 同时对电源的控制系统" title="控制系统">控制系统设计也提出了更高的要求。目前多数的大功率特种脉冲电源" title="脉冲电源">脉冲电源是由高性能的单片机或DSP (数字信号处理器) 构成其控制系统。文章介绍了一种基于新型工业控制机PCC 的电源控制器设计和实现方法。
1 电源系统" title="电源系统">电源系统组成及主要技术指标
合金表面特种加工工艺要求大功率脉冲电源能够提供大电流、高电压的双向不对称脉冲, 同时电源的主要参数要随着工艺过程中负载的变化而大范围地连续调节, 这就要求电源能适应工艺曲线的变化给出最佳的控制规律[1 ] 。电源主要技术参数为: ①供电电源: 50 Hz , 380 V ; ②输出平均电流: 0~240 A 连续可调" title="连续可调">连续可调; ③输出峰值电流: 0~1 500A连续可调; ④输出峰值电压0~800 V 连续可调; ⑤换向频率0~200 Hz 连续可调; ⑥脉冲工作频率: 0~5kHz 连续可调; ⑦脉冲占空比" title="占空比">占空比: 5~95%连续可调。
电源系统硬件组成原理如图1 所示。图中, 全控整流电路实现调压、移相调功, 其输出经滤波电路与PWM逆变电路的直流输入端相连, 后者输出电压平均值随整流电路的导通角α大小而改变。负载所需的脉冲工作频率、占空比、脉冲宽度由PWM逆变电路变换, 经尖峰抑制电路处理后供给负载。双向脉冲采用非对称矩形脉冲输出波形, 且脉冲工作频率和占空比是连续可调的, 以满足不同加工工艺的需要。因此只要合理控制逆变电路中功率开关元件的通断, 就可实现对频率、换向比和占空比等参数的连续调节。
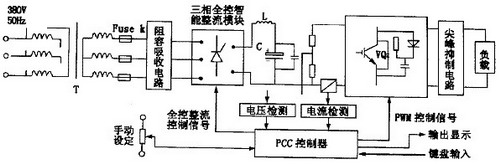
图1 电源主电路及控制系统原理框图
2 控制系统的硬件设计
2.1 PCC 控制系统简介
PCC(可编程计算机控制器) 是集计算机、通讯和自动控制技术为一体的新型工业控制装置,具备极高的可靠性、丰富的高级编程语言和函数库, 其强大的功能、灵活的结构和丰富的I/ O 模块配置, 能够胜任大型集散控制系统和复杂的过程控制。本项目所设计的脉冲电源控制系统采用奥地利B&R 公司的PP41(PCC 系列产品) , 是集人机面板与控制系统于一体的工控装置。其CPU 是32 位的Motorola M68300 微处理器, 运算速度快, 并配有RS232/ RS485 接口、CAN 总线接口以及PCMCIA 插槽, 除自身集成10 个24VDC 的开关量输入和8 个24VDC 的开关量输出通道外还能选配6 个B&R2003 旋入模块。用户RAM 为700Kbyte 的SRAM, 系统PROM 为600 Kbyte 的Flash PROM, 用户PROM 为114 Mbyte 的Flash PROM, 同时还可根据用户的需要插入PCMCIA 卡以扩充存储容量。PP41 具有内部电压监控功能和防止软件跑飞的看门狗。带有用户可自定义的小键盘和分辨率为QVGA (320 3 240 像素)的LCD , 且体积小便于安装。键盘和液晶显示器面板与主机间通过RS485 总线连接, 二者既可分离也可集成在一起安装。PP41 对键盘、显示、控制面板、看门狗等功能的高度集成以及丰富的函数库省去了单片机开发中的许多工作量, 大大缩短了开发周期[2 ] ,其工业级的品质保证了控制器的可靠性。根据控制系统的功能和要求设计的电源控制器如图2 所示。
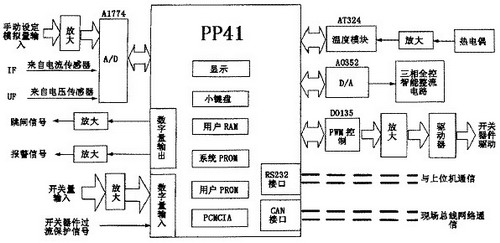
图2 电源控制器的组成框图
图2 中模拟量输入模块AI774 有4 路微分输入, 均为12bit 分辨率的0~20mA 的电流输出方式, 可直接采集霍尔电压、电流传感器的检测信号。而电压控制信号的生成则采用双通道12bit 分辨率的模拟量输出模块AO352 , 其0~10V 的电压输出方式即可直接连续调节三相全控智能整流模块的电压输出。
PP41 控制器中集成了TPU (时间处理器) 来产生PWM信号, TPU 可以在不增加CPU 负担的情况下实现脉冲计数、PWM 信号生成、频率测量、步进电机的控制、同步数据通信、脉冲定位等功能。B&R 公司开发了TPU Code Linker (TPU 代码链接器) , 可以在CPU 热启动时通过内部模块总线将代码送入CPU 与TPU 之间的2Kbyte 的RAM, 之后只有TPU 有权直接访问此存储区并通过LTX函数来控制时间处理器的工作。
B&R 公司提供了许多具有TPU 功能的输出模块,PCC 系列中有专用的DO135 模块可方便的产生PWM 信号, DO135 为4 路的数字量输出模块, 最大工作频率可达到100 kHz。控制系统工作在PWM 方式下, 因此应用PCC 软件库提供的LTXdpwm ( ) 函数只需要设置PCC的数据字和控制字即可方便的连续调节频率和占空比。PWM方式的开关由16 位计数器来控制, 计数达到65535 后随即返回0并重新开始计数, 控制PWM 开关的计数值即可调节占空比。PWM 信号由DO135 产生后即可供给功率开关器件的驱动电路。
2.2 模糊控制" title="模糊控制">模糊控制器设计
大功率脉冲电源已被广泛地应用于许多工业领域中, 其控制算法通常采用常规PID 控制, 其算法简单,鲁棒性好, 可靠性高, 适用于负载性质确定且负载变化范围不大的场合。
由于文章涉及到的电源负载是随着工艺过程的进行, 其性质和大小均有较大范围的变化, 很难建立其数学模型, 实践证明采用常规PID 控制器难以达到理想的控制效果。
文章所设计的电源控制器, 其重要的控制功能之一就是在生产过程中当负载电流受工艺影响或当系统受到强干扰时负载电流发生突变(有时出现尖峰) , 或按工艺要求突加负载和突卸负载时, 能够通过调节电压, 迅速使电流恒定在设定的工艺曲线上。
为保证电源输出电流为设定值, 控制系统采用电流闭环控制。脉冲电源输出的电流经霍尔传感器反馈到微处理器中, 模糊控制器根据电流误差及误差的变化率按照模糊控制规则得到控制量Δu , 来控制电源系统的输出电流。
模糊控制系统如图3 所示。
Ii -手动设定电流值; Io -负载端输出脉冲电流平均值

图3 模糊控制原理框图
其具体设计如下:
(1) 选择模糊控制器的语言变量。模糊控制器的输入语言变量选为手动设定电流值Ii 与实际负载端输出脉冲电流平均值Io之间的差e = Io - Ii 及其变化率d e/ d t , 而其输出语言变量为被控对象的控制量u 。
(2) 建立输入语言变量误差E、误差变化EC 和输出语言U 的赋值表。
设定E、EC 和U 为下列模糊子集:
E = EC = U = { NB NM NS 0 PS PM PB}
其中NB = 负大, NM = 负中, NS = 负小, 0 = 零, PS= 正小, PM = 正中, PB = 正大。根据马达尼法, 设定E , EC 的论域为[ - 6 , + 6 ] , 并将其量化为13 个等级, U 的论域为[ - 7 , + 7 ] , 量化的等级为15 个,
E = EC = { - 6 , - 5 , - 4 , - 3 , - 2 , - 1 ,0 ,1 ,2 ,3 ,4 ,5 ,6}
U = { - 7 , - 6 , - 5 , - 4 , - 3 , - 2 , - 1 ,0 ,1 ,2 ,3 ,4 ,5 ,6 ,7}
(3) 选择控制规则
用"IF A AND B THEN C"的模糊条件语句来描述, 该控制器把实际控制策略归纳为: IF E = NB AND
EC = NB THEN U = PB . . . . . . . . . 等条件语句, 控制规则表详见文献[3] 。
(4) 确定模糊推理算法和模糊判决方法, 建立模糊控制器查询表。
采用的模糊推理算法是Mamdani"最小- 最大"推理法[4] , 模糊判决为重心法, 为了减少在线计算量,采用离线计算, 形成以观测值和与之对应的控制值为内容的模糊控制表。
在电源控制系统中, 电压、电流均可以采用模糊控制的算法来增强控制系统的动态稳定性,但生成的是在原先控制量基础上的变化量Δu , 因此在实际的控制系统中的控制量为原先控制量u 与Δu 之和[5] 。在PCC 控制系统中, 我们将离线运算得到的模糊控制表以数组的形式输入到存储器中, 这样当运行模糊控制子程序时, 模糊推理和判决的工作量就会相对减少。模糊控制程序如图4 所示。

图4 模糊控制程序流程图
在实际电源系统中不允许发生大电流的阶跃和冲击。所以在实验过程中设定平均电流为150 A , 对其施加幅值为30 A 的阶跃试验, 并用上位机监控软件完成数据采集及显示, 图中步长为20 ms。
实验结果符合设计思想, 响应曲线超调小, 上升时间短, 动态性能好, 电源控制系统采用模糊控制算法取得了良好的控制效果。
上升时间tr = 480 s ; 超调量δ% = 419%
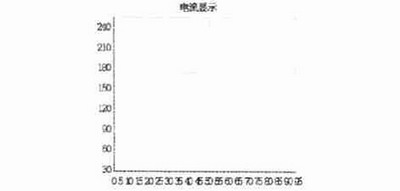
图5 PCC 电源系统阶跃响应示意图
3 结束语
以PCC 作为大功率特种脉冲电源系统的核心控制器, 控制器硬件选用B&R 公司PCC 系列的PP41 , 其主要优点是硬件模块化和抗干扰能力强。采用高级语言ANSI C 作为PCC 的软件编程语言, 开发的程序简洁易读, 可移植性强, 修改方便, 有与其硬件类似的模块化结构的特点。模糊控制算法的引进, 不仅保证了电源可工作于恒压、恒流两种工作方式下, 且使得电源控制系统的稳态特性和动态品质有了明显的提高。
参考文献:
[1 ] 吴小华, 张晓斌, 郑先成. 模糊PID 控制器在中频电源中的应用[J ] . 电力电子, 2002 , 8 (4) :56 - 58.
[2 ] 齐容. 可编程计算机控制器原理及应用[M] . 西安: 西北工业大学出版社, 2002.
[3 ] 陶永华. 新型PID 控制及其应用(第2 版) [M] . 北京: 机械工业出版社, 2002.
[4 ] 刘金琨. 先进PID 控制及其MATLAB 仿真[M] . 北京: 电子工业出版社, 2003.
[5 ] 吴志强. 模糊控制系统稳定性的分析和综合[J] . 计算机自动测量与控制, 2001 , 9(4) :19-21.
基金项目:本课题受国家"十五"科技攻关重大专题资助(2001BA311A06-3)
