1 前言
可编程控制器(PC)包括可编程逻辑控制器(PLC)和可编程计算机控制器(PCC)。无论是PLC还是它的升级产品PCC,其基本组成和工作原理部是相同的。但是,PCC具有一般PLC所不具备的特点:① PCC已经采用了多任务操作系统;② PCC不但支持梯形图和C语言等各种高低编程语言,还具有专为工业控制开发的高级语言,它比通用的高级语言,如C 语言更适用于工业控制,更易于编程;③ PCC可以支持多个主CPU同时工作,而且还具有智能处理器,如专门的时间处理单元守(TPU)。综上所述可看出,PCC在很多方面突破传统,在PLC中引入了新的思想和编程思想,更易于实现日趋复杂的控制要求[1]。步进电机在工业领域应用非常广泛,实现PCC控制的步进电机具有很大的实用价值。
2 步进电机的控制
步进电机的性能对控制系统的设计具有重要的意义,在设计时需要综合考虑步进电机的步距角、细分数、保持力矩等,使调速系统具有高的可靠性。
在步进式PCC调速器中,根据步进电机的控制脉冲生成方式,它的控制方式分为直接控制和间接控制两种方式。前者,由PCC完成脉冲生成和脉冲分配,并输出与步进电机相适应的脉冲,再经过功率放人驱动步进电机;后者,由PCC完成脉冲生成并输出步进脉冲和方向控制信号,再由硬件或其他装置(如步进电机驱动器)实现脉冲分配和功率放大。采用直接控制方式时,步进电机运动频率由高速任务组的扫描周期决定,步进电机的运动频率愈高,则要求高速任务组的扫描周期愈短,这样,占用CPU的时间就愈长;采用间接控制方式时,其功能由TPU完成,不占用CPU 资源;脉冲分配由步进电机驱动器完成,且具有更完善和灵活的控制功能(如升降速等)。因此在步进式PCC调速器中主要采用间接控制力式。
图1 示出以两相混合式步进电机为例,采用间接控制方式的控制结构。在PCC间接控制方式下,方向控制信号根据控制量增量值的正负确定,输出脉冲信号经过步进电机驱动器完成脉冲的分配,使步进电机按照所要求的力向和位移量或角度转动。
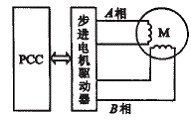
图1 两相步进电机PCC控制电路
步进电机选用美国Palker 公司的OEM83 一135 , 驱动器选用Palker 公司的OEM750 , PCC模块选用奥地利B&R公司的POWER PANEL.PP41 ,数字量输出模块选用可与TPU 通道相连接的高速输出模块DOl35 。PCC通过数字量输出模块输出步进脉冲信号和方向控制信号,送入OEM750 步进电机驱动器的相应端口, 由OEM750 步进电机驱动器产生与步进电机相适应的驱动脉冲驱动步进电机。在PCC 内部控制步进电机的脉冲信号通过调用TPU功能块LTXPestXO 产生,该模块专门为步进电机设计,具有与步进电机驱动器相适应的两个输出信号,即步进脉冲信号和方向电平信号。PCC 输出的步进脉冲信号用于控制步进电机的位置和速度。也就是说,驱动器每接受一个脉冲就驱动步进电机旋转一个步距角,改变脉冲频率,则同时使步进电机的转速改变,控制脉冲的个数,则可使步进电机精确定位,以实现步进电机调速和定位的目的。PCC输出方向的控制信号用于控制步进电机的旋转方向,此端为高电平时,电机顺时针旋转,反之,电机逆时针旋转。
2 .1 步进电机驱动器
OEM75驱动器具有分辨率、静态锁定电流、最大驱动电流等参数设置以及升降速控制等功能,并具有使用方便、安个可靠等许多优点。
分辨率(步进电机运行一圈的步数)的设置可多达16 级,范围从每圈200 步至每圈508 ( ) 0 步不等,可满足用户的不同要求。设置时,可通过对该驱动器上的开关2 的2 到5 位进行。在PCC调速器中选取每圈步数为1000步,这样步进电机的步距角为0.36度 ,完全满足了调速系统的要求,同时由于驱动器采用了细分技术,因此对步进电机的低频震颤也起到了很好的阻尼作用,增强了系统的稳定性和可靠性。
步进电机在静止状态时的静态锁定电流有4 种不同的电流等级可供选择。由于PCC 调速器中的锁定力矩较小,故选取静态锁定电流为最大驱动电流的25 % ,以降低步进电机温升并延长其寿命。
为使电机能有最大力矩又不引起电机的振荡和噪音,在PCC调速器中将最大驱动电流设置为7.5A , 供电电压为24v 。电流环增益按下式计算:
Ki= 364 000 LM/U
式中 LM——-电机电感(H) U——-电源电压
需注意,当电机需要改变运动方向时,必须使改变方向的控制电平信号至少保持200us。
2 .2 TPU功能块LTXPestXO模块
TPU 是PP41 模块微处理器所具有的一个时间处理单元,主要用于外部处理事件计数、门电平时间测量、频率测量、脉宽调制等与时间有关的任务(timing tasks ) ,缩短CPU 模块为处理这些任务调用中断服务程序所占用的时间。TPU功能模块包含TPU操作系统、TPU 配置、完成特定功能的TPU 程序模块等,应用程序通过它与TPU通讯传递参数和数据,该功能模块由B&R公司专门研制的TPU 编码连接器产生,并在CPU 热启动(warm start)时,将自己传入TPU 的RAM 中,由此接管TPU 让它完成用户特定的功能。
在步进电机控制中,主要利用功能模块LTXPestXO,它与D0135 模块配合使用,占用2 个TPU 输出通道,第一通道为控制步进电机转速的脉冲信号,第二通道为控制步进电机力向的信号。它能根据绝对位置或相对位置两种模式调节步进电机。该模块在循环任务中调用。需注意,该模块只能在程序的一个地方调用,否则不同程序部分调用同一硬件可能引起冲突。
功能模块LTXPestXO可对包括步进电机起/停时的最小速度和最大速度、步进电机升速时的加速度和减速时的加速度、绝对目标位置和相
对目标位置等众多参数进行设置,使得PCC与步进电机配合使用非常灵活且功能强大,从而实现对步进电机及驱动器的良好控制。
3 应用
目前已有多台步进式PCC调速器已在四川越西铁马二级电站、四川飞罗电站等水电站投入运行。经对四川越西铁马二级电站2 号机组调节系统进行全面的静动态特性试验,其结果表明,性能指标已满足或优于国标GB/T9652.1一1997的要求,其中主要特性试验结果:① 调速器转速死区小于0.04 %;② 甩25%额定负荷,接力器不动时间为0.16s;③ 甩100%额定负荷时,转速最大上升为额定转速的118% ,调节时间为19s;④ 空载时扰动量取8% ,选若干组参数进行试验比较,当Kp=1.7 , Kz=0.32, KD= 1.7 时比较理想,扰动后调节时间较短,接力器摆动一次,且机频超调小。
4 结束语
将PCC控制步进电机用于水轮机调节系统,数十座电站的运行结果表明,其设计合理,运行状况良好,将步进电机用于水轮机调速器中,有效地解决了以往调速器存在可靠性低的问题,简化了调速器结构并降低了造价,完全能满足水轮机调速器动静态的要求,具有很高的可靠性。
参考文献
[1] 齐蓉.新一代可编程计算机控制器技术[M]. 西安:西北大学出版社,2000.
[2] OEM75O Driver User Guide[Z].Parker Hannifin Corporation,1997.
作者简介:何跃贵(1965)男,云南人,高级工程师,研究方向为电力电子技术。
