
随着工业和科学技术的不断发展,对电能质量的要求将越来越高,包括市电电网在内的原始电能的质量可能满足不了设备要求,必须经过电力电子装置变换后才能使用,而DC/AC逆变技术在这种变换中将起到重要的作用。根据市场趋势,逆变器的选型安装越来越倾向于小型化、智能化、模块化等方向发展,其控制电路主要采用数字控制,系统的安全性,可靠性以及扩展性,同时将各个完善的保护电路考虑其中。因此,这里提出一种基于IR2101的最大功率跟踪逆变器设计方案。
1 IR2101简介
IR2101是双通道、栅极驱动、高压高速功率驱动器,该器件采用了高度集成的电平转换技术,大大简化了逻辑电路对功率器件的控制要求,同时提高了驱动电路的可靠性。同时上管采用外部自举电容上电,使驱动电源数目较其他IC驱动大大减少,在工程上减少了控制变压器体积和电源数目,降低了产品成本,提高了系统可靠性。
IR2101采用HVIC和闩锁抗干扰制造工艺,集成DIP、SOIC封装。其主要特性包括:悬浮通道电源采用自举电路;功率器件栅极驱动电压范围10~20 V;逻辑电源范围5~20 V,而且逻辑电源地和功率地之间允许+5 V的偏移量;带有下拉电阻的CNOS施密特输入端,方便与LSTTL和CMOS电平匹配;独立的低端和高端输入通道。IR2101的内部结构框图如图1所示。
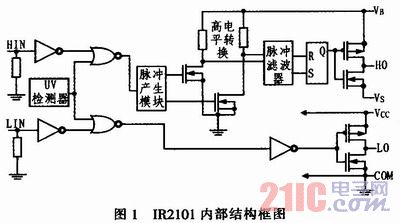
图1中,HIN为逻辑输入高;LIN为逻辑输入低;VB为高端浮动供应;HO为高边栅极驱动器输出;Vs为高端浮动供应返回;Voc为电源;LO为低边栅极驱动器输出;COM为公共端。
2 系统硬件设计
根据系统设计功能需求,其硬件组成框图如图2所示。该系统硬件设计是由SPMC75F2413A单片机主控制器模块、外部供能系统(普通或光伏)、斩波电路模块、IR2101逆变电路模块和最大功率跟踪外部电路模块组成。通过最大功率跟踪外部电路模块检测外部电压,将检测值返回到SPMC75F2413A主控制器中。斩波电路模块通过主控制器对其控制,实现最大功率跟踪。外部供能系统是为各个模块提供电源。IR2101逆变电路模块主要实现DC/AC的转换,并由斩波电路为其提供最大功率点的电能。
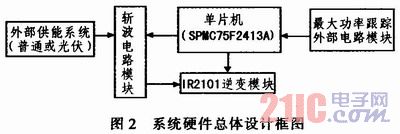
图2中的SPMC75F2413A单片机正常工作电压为5 V。但是其他模块所加的电压不同,斩波电路模块与IR2101逆变电路模块所加的电压为15 V。因为IR2101的正常工作电压为10~20V。
2.1 IR2101逆变电路
IR2101逆变电路原理图如图3所示,H1、H2为IR2101集成驱动芯片,VQ1、VQ2、VQ3、VQ4为MOS管,Up、Un、Vp、Vn是SPMC75F2413A单片机中输出的两相四路PWM波。其中Up、Un是一相PWM波的上下臂,Vp、Vn为另一相PWM波的上下臂,由于单片机中输出的PWM波不能驱动大功率MOS管,因此利用IR2101的电容自举功能,通过二极管VD1、VD2(采用肖特基管所具有的快恢复功能,提升电容充电电压,关断过程减少消耗能量)对自举电容C1、C2进行充电,以此提升驱动MOS管的信号电压,使其具有扩大信号输出的功能,扩大后的信号PWM波就能有序地控制VQ-1、VQ2、VQ3、VQ4的通断,在逆变电路中同一相的上下臂的驱动信号是互补。
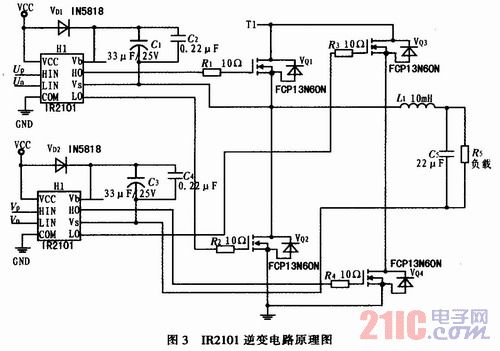
当Up输入高时,HO输出也为高,通过IR2101的电容自举功能,就能控制VQ1导通,此时由于LO输出为低,不能驱动VQ2,因此VQ2处于关断状态,同时Vp也输入一个高电平,即HO为高,使VQ4处于导通状态,而此时VQ3处于关断状态,因此T1→VQ1→R5(负载)→VQ4→GND形成一个通路。反之,当Up、Vp为低电平,Un、Vn为高电平时,即电流的主要流向为T1→VQ3→R5(负载)→VQ2→GND,4个MOS管开关器件有序地交替通断,进而在R5(负载)处形成了交流电。在实际应用中为了防止上下臂同时导通而造成短路,在软件设计的过程中,添加了死区时间,来保护整个电路。
2.2 斩波电路
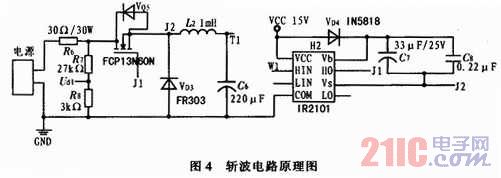
斩波电路原理图如图4所示,该电路主要用于进行最大功率跟踪,其电源为独立电压源,R6(30 Ω/30 W)为功率电阻,其主要作为电源内阻,R7、R8是为了检测负载端的电压值而形成的分压电路,通过Ud1进行检测,将检测结果返回到单片机中进行处理,通过调节PWM波的占空比,进而控制VQ5开启与关断的时间。当检测到Ud1X(R7+R8)/R8的值大于一半时,单片机就会将斩波电路的占空比调大,让其通过的电压增大,进而使其值接近光伏电池的一半,如果检测到其值小于一半的时候,会将占空比调小,让其通过的电压变小,这样通过跟踪电压来实现频率的跟踪功能。
2.3 最大功率跟踪模型分析
本设计为了实现最大功率的跟踪模型,如图5所示电路,使得内阻R8和外阻Rb相等,Ud的电压为电池电源的一半就可以得到电池输出功率最大了,这种情况应用于线性电路中,但是在非线性电路中也可以利用这个原理,本项目通过电压跟踪的功能,实现最大功率的跟踪,主要通过调节PWM波的占空比大小实现本功能。

3 系统软件设计
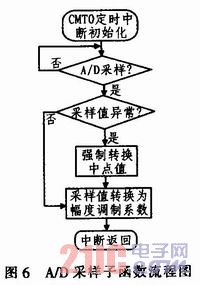
A/D采样函数流程图如图6所示,此函数主要是用于采集负载端的的电压值,最后转换为幅度调制系数。本此函数中使用了CMT0定时器中断,在此中断中进行了A/D采样,将采集的电压值与换算后的电源电压中点值Vmid(见图4,即利用R7、R8组成分压电路,R7:R8=9:1),进行比较,当差值的绝对值大于100的时候,判断为采集值出现异常,强制将电源电压转换后的中点值转换为幅度调制系数,当二者之间的差值的绝对值小于100时,将差值加到Vmid上,然后再转换为幅度调制系数,最后返回中断。
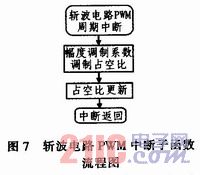
在本函数中斩波电路的PWM中断使用了TPM2中断,在此中断中使用了幅度调制系数去调节斩波电路的PWM波的占空比,进而实现电压的跟踪功能,最终是实现最大功率的跟踪。斩波电路PWM中断子函数流程图如图7所示。
4 最大功率测试结果
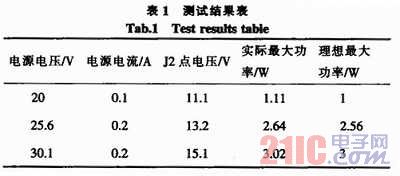
对斩波电路后的J2点进行测试的,将J2点处接1个30 W/30 Ω的功率电阻作为负载,测试出表1中的各项数据。
5 结束语
本设计方案采用具有出色性能的定时器PWM信号发生器组的16位结构的微处理器SPMC75F2413A单片机进行设计,主要利用了此单片机的PWM信号发生器组产生控制逆变电路和斩波电路的PWM波,还利用了IR2101的自举功能,对功率MOS管进行有序驱动,实现逆变,控制斩波电路的PWM波占空比,实现了最大功率的跟踪逆变器的设计。通过验证,输出的正弦交流信号十分明显,并具有最大功率的跟踪功能。