
摘要:设计了一种以飞思卡尔MC9S08GB60 单片机为控制核心的汽车电控空气悬架系
统。着重阐述了其硬件电路系统和具体电路设计,并对软件设计要点进行了介绍。通过在实验室进行台架测试,验证了本系统相对于被动悬架系统有效的改善了悬架动行程,车轮动载荷及车身垂直加速度三项重要指标,在实现车身高度调节控制的同时改善了车辆乘坐的舒适型。且电路结构简单,稳定性好,有实用应用的价值。
关键词:MC9S08GB60 电子控制单元空气悬架
0 引言
空气悬架主要有被动悬架和可控电子悬架。被动悬架一定程度上抑制和降低了车体和车
轮的动载和振动,保证了车辆行驶安全性和乘坐舒适型。但由于被动悬架的刚度和阻尼系数一般按经验选取,只在特定环境下是最优,而一旦载荷,路况,速度等因素发生变化,被动悬架不能随之而自动调节,更不能手动调节。为了克服这一缺陷,电子空气悬架系统(ECAS)由此产生。ECAS 是目前最先进的汽车悬架系统,它可以随着路况,载荷,速度等变化因子自动调节悬架刚度,车身高度,减少了空气消耗,且具有反应迅速,安装容易,操作简单等优点,因此可控电子悬架已经成为汽车电子领域研究的一个热门课题,其有着广阔的发展前景。
1 ECAS 的组成及原理
电控空气悬架系统由电子控制单元(ECU),高度传感器、空气弹簧、速度传感器、减震
器,车高升降控制键盘等组成。ECU 通过高度传感器实时检测车身高度,间接获得车身垂直加速度,同时通过速度传感器检测车辆行驶速度。ECU 内保存若干指标高度和三级可调阻尼值,指标高度与弹簧的舒适性、驾驶安全性和与应用规范保持一致。车速在不同的行驶条件下由ECU 自动执行相应的指标高度,也可由驾驶员手动控制高度和阻尼值。通过比较高度传感器检测结果和指标高度,若高度差超过了一定的公差范围,电磁阀就会被激发,通过充放气将实际高度调整到指标高度。减震器阻尼力共三档,根据车身上升速度、加速度控制减震器,执行相应的阻尼力,从而满足汽车行驶平顺性和乘坐舒适型的要求。电控空气悬架组成结构如图一。
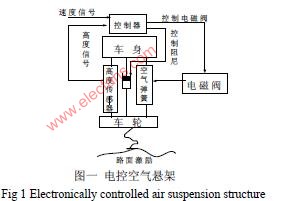
Fig 1 Electronically controlled air suspension structure
2 ECAS 系统各功能模块的设计
ECAS 主要由6 大功能模块组成,分别是中央处理单元,信号输入模块(即传感器信号),信号输出模块(即控制量的输出),操作界面模块,电源模块,其他模块(外接存储器,RS485通信,系统的升级扩展端口)。
2.1 MC9S08GB60
单片机是ECU 的核心部件, 它要经常处理大量的输入和输出信号, 而且要实现高精度
和实时控制。本设计采用了美国飞思卡尔公司的加强型8 位车用微控制器——MC9S08GB60单片机。该单片机内有64K flash 和4K 的E2PROM,高度集成了四个串行通信端口(SCI1,SCI2,SPI,I2C) ,最多达8 个定时器(PWM),8 通道的10 位A/D 转换模块。
2.2 信号传感输入模块
该模块主要由3 个高度传感器和1 个速度传感器构成。车身高度传感器等效电感串联
电阻。等效电感0°转角时对应约20mH,-45°转角时对应约8mH,+45°转角时对应约35mH。等效电阻120Ω。为此设计了LC 三点式振荡电路来检测车身高度传感器传来的信号,即设计一个正弦波发生器,由TL082 元件及外围电路构成,正弦波的频率随高度传感器等效电感的变化而不断变化,而后经比较器出来一个频率随电感不断变化的方波,经三极管放大和光耦隔离后输入到MCU 的输入捕捉端口。MCU 通过检测这一不断变化的频率来实现对高度传感器传来信号的检测。电路如图二所示,对速度传感器信号的检测也是通过检测其频率实现的,原理同高度传感输入电路类似。
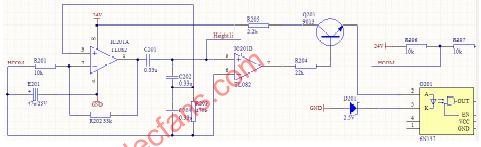
图二 车身高度检测电路
Fig 2 detection circuit of vehicle’s height
2.3 信号控制输出模块
ECU 采用PWM 方式输出控制电磁阀的开启,根据当前实际高度与预期调节高度的偏差来输出控制信号。ECU 计算电磁阀的调节脉冲长度,如果需要调节的高度量大、由于没有过冲危险,ECU 将给出一个长的脉冲,同时,快的上升速度将减小脉冲长度,这样就能精确控制车辆的高度调节速度,极大的避免了高度的过冲及振荡调节.对于电磁阀的驱动,本设计选用了安森美半导体公司生产的NUD3124 继电器驱动芯片。NUD3124(汽车版本)器件的高反向雪崩能量容量(350mJ)可以控制大多数用于汽车应用的继电器。控制信号经过光耦隔离后输出给NUD3124 驱动芯片,由NUD3124 驱动电磁阀工作,并在NUD3124 的输出端加了一个二极管保护电路。
2.4 电源模块,操作界面模块及其他扩展功能模块
ECAS 系统主要有两种电压源,一是24V 电压源,二是3V 电压源。其中3V 电压源分数字电压源和模拟电压源。24V 电源是由车辆自身电源引出,然后经π 型滤波,再经稳压管稳压,在经过一个滤波电路最终得到一个稳定的24V 电压源。3V 电压源与此类似,只是须要在数字电源和模拟电源之间加上一个隔离电阻,以防串扰。
操作界面主要是键盘输入和发光二极管显示。当司机要手动控制阻尼和车高的时候,便可通过键盘输入其操作,然后相应的发光二极管亮,显示其输入。键盘输入经过了滤波,光耦隔离和IC106 滤波及保护,最终送入ECU,然后ECU 输出控制驱动相应发光二极管点亮。其他模块主要包括便于日后升级的接口,以及RS485 通信,大容量存储器等。大容量存储器采用了ATMAL 公司的AT24C1024,其通过PTC2/SDA 和PTC3/SCL 与单片机相连;RS485用典型接法即可,芯片采用max3485;其他未用引脚均通过插槽引出,以便于日后升级之用。
3 汽车ECAS的软件设计方案
空气悬架电子控制单元(ECAS)应用软件由系统初始化模块、判断手动自动调高模块、信号采集模块,键盘响应模块,输出控制模块等构成。主程序为一循环体,它担负调节车身高度和阻尼的任务,车身高度信号经传感器转换为具有一定占空比的方波信号,然后经过与微处理器中预设的标定高度进行比较,输出控制信号,当快达到标定高度时,减小输出信号的占空比,以防止过充。具体主程序框图如图三所示。
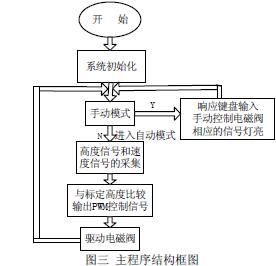
Fig 3 the structured flowchart of main program
4 试验及结果分析
本设计做了两自由度1/4 车辆空气悬架试验,通过在一定频率特性下,对比分析电控空
气悬架和被动空气悬架在相同的路面激励下,得到不同的悬架动行程,车辆动载荷及垂直加速度,来验证本设计的可行性[4],验证本设计是否达到了提高车辆行驶平顺性和乘坐舒适型的目的。为下一步将科研成果转换成汽车电子产品提供技术储备和试验手段。
本试验系统用到了美国 INSTRON 公司8800 数控液压伺服振动测试系统、空气弹簧、减振器、本文设计的控制器、加速度传感器、车身高度传感器、速度传感器,Wavebook 信号采集器、电脑等。试验原理如图四所示.试验系统上多加了两个传感器,分别是加速度传感器和压力传感器,加这两个传感器是为了测出簧上垂直加速度和轮胎动载荷。本试验过程中激励信号采用模拟B 级路面、车速50km/h 的白噪声随机输入信号,试验时间30s,采样间隔0.01s,空气弹簧工作高度275mm,分别采集空气悬架加控制器前、后的簧上质量垂直振动加速度,悬架动行程和轮胎动载荷。实验结果如图五所示,通过本实验我们可以看出用本文所设计的电控空气悬架系统明显在悬架动行程,车辆动载荷和垂直加速度三项指标上都比被动悬架有明显的改善,其中簧上质量垂直振动加速度的均方根值下降了12.89%说明本文所设计的控制器有效地改善了车轮的行驶平顺性,得到了较好的悬架特性,有实际应用的价值!
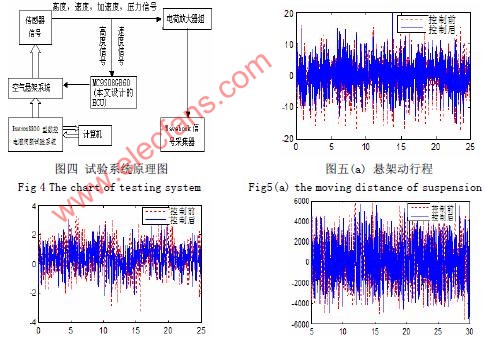
图五(b) 垂直加速度 图五(c) 车轮动载荷