汽车工业正在寻找保护驾驶员和乘客安全的创新方法,从一些小幅度地增强安全性能开始,最终目标是创建完全的自主型汽车。汽车工业在防抱死制动系统、电子稳定性控制、多个安全气囊以及最近出现的后视摄像头系统等安全功能应用方面出现了高速增长。
同时,汽车工业也持续承受着来自各种政府团体和消费者本身的压力,要求生产出具备更有效的安全特性的车辆。例如,美国国家公路交通安全管理局(NHTSA)已经提出在每辆车的后面定义一个具体的区域,当车辆倒车时,驾驶员必须能够看到这个区域,其解决方案就是后视摄像头系统。同样,欧洲各国的新车评价程序(NCAP)正在推动安全特性的发展,比如碰撞预警、车道偏离预警、自动远光灯控制和其它安全特性等等。
安全推动项目
安全标准通常由政府机构规定或由保险行业推动,这些标准日益重视能够提高安全性,同时有机会改善用户体验的新技术。这使得相关技术供应商不仅能够脱颖而出,还可获得较高的投资回报。
自主型汽车的驾驶员辅助系统介绍和演进
自上世纪90年代初以来,先进驾驶辅助系统(ADAS)的开发人员一直努力提供更安全、更便利的驾驶体验。在过去二十多年里,超声波辅助停车、自适应巡航控制和车道偏离预警系统等特性已经部署在高档车辆中。最近,汽车制造商已经增加了后视摄像头、盲点检测和环景显示系统作为选件。除超声波辅助停车之外,ADAS系统的部署量一直有限,但是,预计在未来十年内ADAS系统的部署量将会显著上升。
目前,政府可能制定的法规、消费者对安全特性的强烈兴趣、以及远程传感器和相关算法的创新正在推动ADAS部署量增长,这些算法往往用来提取和解释关键的安全信息。随着时间的推移,这些ADAS系统将变得更先进,并且将从高档车辆转向主流车辆,其中,基于摄像头系统的处理将起到非常重要的作用。
利用这些技术开发提供的动力,汽车工业已经开始认真地考虑开发最大程度减少人为干涉、自动驾驶的自主型汽车。
目前车辆中已有的某些特性实例可以作为自主型汽车的早期基础,下面将对这些特性进行讨论。
自适应巡航控制(ACC)
自适应巡航控制(ACC)是高档车辆的可选特性,利用雷达或激光装置,当车辆接近另一辆车时,使车辆减速,当交通条件允许时,则重新加速到预定速度。这种系统将成为未来智能车辆的基础,进一步增加车辆的安全特性。
车道偏离警告(LDW)
美国国家公路交通安全管理局(NHTSA)于2003年开展的一项研究表明,55%的死亡事故是由于车辆偏离车道,撞上其它车辆或路边障碍物所致。以上数据为LDW系统提供了支持,当车辆偏离其指定车道时,LDW系统可以向驾驶员报警,。
基于摄像头的LDW系统利用安装在后视镜后面的小摄像头检测公路上的车道标线。摄像头检测公路边缘标线,如果驾驶员无意间跨过车道(未使用转向信号),则会发出预警 — 如方向盘振动 — 提醒驾驶员回到车道。
在组合使用雷达和摄像头技术的系统中,摄像头的图像及车辆速度被发送到系统的微处理器中,这些信息用于计算汽车和车道标线之间的距离及相对于车道标线的横向速度变化率。然后,该微处理器将其与标准数据进行比较,判断车辆是否偏离车道。如果根据距离和横向速度,判断车辆偏离了车道,则会通过仪表盘上的指示灯或通过类似蜂鸣器报警向驾驶员发出警告。
碰撞缓解或碰撞预警
这些系统一般利用配备辅助系统如激光雷达的单一前视摄像头,或者利用两个摄像头立体系统,其中立体成像用于确定距离及检测车前的车辆和物体。利用这种系统的信息并结合车辆状态来确定是否存在需要向驾驶员报警的状况,或者在一些更高级的实施方案中,该系统干预并执行制动,以避免发生碰撞。
目前,这些系统对于减少典型通勤交通堵塞状况下出现的“轻微碰撞”有较大的作用,并且有可能避免更高车速下发生的更严重事故。
到2015年市场将可以提供具备部分自主驾驶功能的车辆,到2020年将出现具有更先进的自主型汽车。
基于摄像头系统(即防撞)、可嵌入到汽车或移动设备中的先进车辆对车辆或者车辆对基础设施通信系统、以及其它许多正在开发的技术的结合,构成了一个通过融合各种传感器和通信技术而实现自主型汽车的未来前景。
传感器技术融合:在一个系统中集成多种感测技术
先进驾驶辅助系统(ADAS)应用,如车道偏离预警、碰撞预警和远光灯控制正被人们快速接受。预期新车评价程序(NCAP)、美国国家公路交通安全管理局(NHTSA)五星安全评级将会提高这些应用的配售率。分析人士预测,到2017年,车道偏离预警配售率的增长将超过10%。在这种系统中采用雷达、摄像头和超声波传感器,实现先进的安全特性,它们包括:
• 后向自动刹车
• 自适应巡航控制
• 智能辅助制动
• 前向碰撞预警和缓解
• 安全警示座椅
• 车道偏离预警
• 盲区检测
• 后方路过交通警示
• 远光灯控制
• 后视摄像头
• 平视显示器
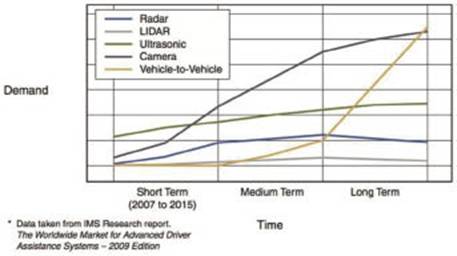
图1 各种汽车传感器需求随时间的变化状况
在自适应巡航控制、车道偏离预警、前向碰撞预警、低速碰撞缓解及遇到行人时自主刹车等主动安全特性实施中整合摄像头技术和雷达技术,可以减少事故、伤害和昂贵的财产损失。
随着更多的主动安全特性从可选项目转为标准配置,传感器融合系统将有助于降低成本,并在市场上变得更为普遍。
集成雷达和摄像头系统可在单一模块中实现雷达探测、视觉传感和数据融合。这种技术集成有助于为汽车制造商提供最好的价值。
特别需要指出的是,传感器融合将使未来的主动安全特性系统能够处理更多的输入信号,以便提供360度碰撞风险检测和增强的驾驶辅助特性。如上图1所示,如果系统综合了几种传感技术优点,并且有效管理这些输入信息,可以提供建议、预警和控制干预,帮助驾驶员避免碰撞和拯救生命。
传感器融合也是开发半自主和全自主型汽车的构建模块,设计用于保持车辆在车道中的位置,并适应周围交通环境。可以设想,到2020年,将可以提供更多先进的自驾技术,实现半自主和全自主驾驶。
通过将GPS与车辆对车辆通信、距离传感和物体检测技术相结合,传感器融合技术开发可以实现自主型汽车所需要的特性,可根据实时交通信息自动选择最快的路径。
没有任何单一的传感技术能够实现这些解决方案,因此,采用多种技术的多传感器能够以部署这些系统必需的价位提供最佳的解决方案。
最终实现自主型汽车安全系统的各种系统中使用的某些传感器技术包括:
视觉——基于图像传感器的摄像头系统,用于自适应视觉处理的高速并行处理系统。
雷达——毫米波长雷达扫描可用于防撞,尤其在因烟雾、灰尘导致天气模糊的环境下。
雷达/激光雷达——激光检测和测距或光检测和测距利用激光来检测与物体的距离,类似于雷达系统。
车辆传感器——车辆配备的其它传感器还用于提供关于车辆状况或性能好坏的反馈情况。一般说来,这些传感器与驾驶员控制台或仪表盘上的相同,如里程表、引擎温度、油压、电池电量和燃料液位等监控信息。
Aptina认为,图像传感器技术的进步是本文中所描述的自主型汽车应用的基础,图像传感器技术与上文所述的其它技术的融合将在迈向自主型汽车的进程中起到重要的作用。
自2004年以来,Aptina一直是汽车领域图像传感器的领先供应商,可提供一系列从VGA到百万像素分辨率的传感器产品。Aptina图像传感器具有业界最佳的低光照性能、高动态范围(HDR)性能和广泛的产品组合,已经获得业界广泛的认可。
结论
汽车工业正持续承受着生产驾驶更安全车辆的压力。目前,基于摄像头的观测系统对于更先进安全系统的开发非常关键。下一代安全系统将在每辆车中使用多种传感器和多种传感器技术,最终实现安全性能非常出色的自主型汽车。
