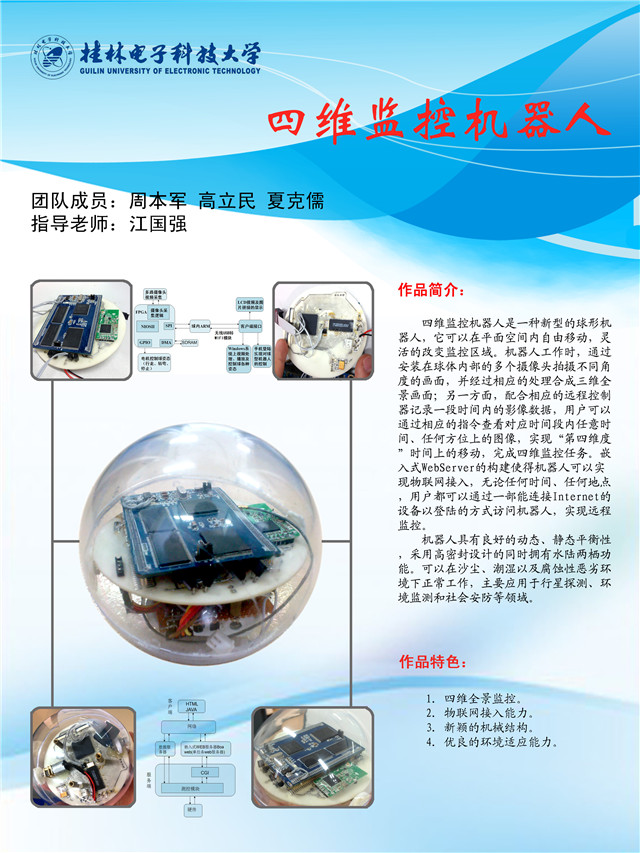
桂林电子科技大学-四维监控机器人 第八届全国研究生电子设计竞赛 摘要: 四维监控机器人是一种新型的球行机器人,它可以在平面空间内自由移动,灵活的改变监控区域,机器人工作时,通过安装在球体内部的多个摄像头拍摄不同角度的画面,并经过相应的处理合成三维全景画面。 关键词: 思维全景 自由移动 远程控制 Abstract: Key words : 原创声明:此内容为AET网站原创,未经授权禁止转载。