
所有类型的传感器在过去几年中都有了很大发展,而且与之前的产品相比,更加精确也更稳定。有的时候,这些传感器使用起来并不简单。面向这些传感器的调节电路设计师,经常发现此类电路的开发多少有些令人头疼。然而,只需少量基础知识并使用新的在线传感器设计工具,这个过程面临的很多挑战都能够迎刃而解。
虽然现在市面上有多种传感器,但压力传感器最为常见。因此,本文将讨论基于惠斯顿电桥压力传感器的基本工作原理,以及用于转换这种桥传感器输出的处理电路,包括偏移和增益校准。
基于惠斯顿电桥的压力传感器
许多压力传感器使用微机电系统(MEMS)技术,它们由4个采用惠斯顿电桥结构连接的压敏电阻组成。当这些传感器上没有压力时,桥中的所有电阻值都是相等的。当有外力施加于电桥时,两个相向电阻的阻值将增加,而另两个电阻的阻值将减小,而且增加和减小的阻值彼此相等。
遗憾的是,事情并非如此简单,因为传感器存在偏移和增益误差。偏移误差是指没有压力施加于传感器时存在输出;增益误差指传感器输出相对于施加于传感器外力的敏感程度。典型传感器一般规定激励电压为5V,具有20mV/V的标称满刻度输出。这意味着在激励电压为5V时,标称满刻度输出为:20 mV/V × 5 V = 100 mV.
偏移电压可能是2mV,或满刻度的2%;最小和最大满刻度输出电压可能是50mV和150mV,或标称满刻度的±50%。
假设两个电阻串联形成电阻串,由于是等值电阻,因此两电阻间的节点电压是电阻串电压的一半。如果一个电阻值增加1%,另一个电阻减小1%,那么两个电阻节点处的电压将改变1%。如果将两个电阻串进行并联,如图1所示,左边下方的电阻和右边上方的电阻阻值均减小1%,另外两个电阻增加1%,那么两个“中”点间的电压将从零差值变为改变2%。两个并行分支的这种配置就被称为惠斯顿桥。

图1:受激励电压VEX和差分输出电压V驱动的惠斯顿桥。
如果不了解偏移以及传感器输出电压和压力之间的真实关系,我们就只能粗略估计施加于传感器上的压力大小。这意味着需要采样校准的方法来获得更好的精度。
幸运的是,给定传感器的偏移和满刻度误差随时间变化相当稳定,因此一旦传感器得到校准,在该传感器生命期内可能无需改变校准系数就能满足精度要求。当然,在每次上电时通常需要再次校准系统。
基本信号调节电路由一个仪表放大器和一个模数转换器(ADC)组成。仪表放大器将来自传感器的小输出电压放大到适合ADC的电平,然后由ADC将放大后的传感器输出电压转换为数字式,再交给控制器或DSP处理(图2)。仪表放大器可以用来避免桥过载,而这种过载会改变传感器输出电压值。
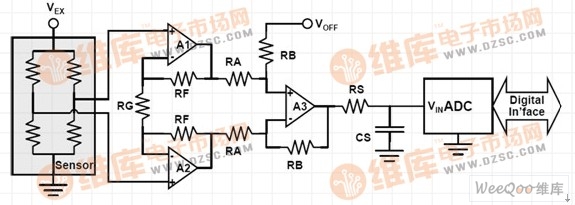
图2:基本压力传感器调节电路。
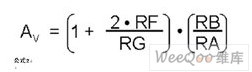
传感器的满刻度输出即最大输入,能够在放大器输入端看到。当传感器输出处于满刻度时,ADC输入应该接近其满刻度值,这个值通常就是ADC的参考电压VREF。放大器要求的增益大小为:

其中VREF代表ADC的参考电压,“Sensor FS”是传感器的满刻度输出值。假设电阻完美匹配,那么仪表放大器的增益等于:
需要解决的挑战
如前所述,关于传感器有两大挑战需要解决:首先是传感器具有输出偏移,这个偏移可以在图2中的VOFF点加合适的电压进行调整,或者在传感器输出被数字化后用软件消除。如果用软件处理,那么VOFF就变成0伏。
用软件消除偏移的问题在于,限制了可测量的传感器范围。如果偏移是正的,将限制可以测量的最大传感器输出,因为放大的传感器输出可能比期望的更早达到ADC满刻度值。如果偏移是负的,将无法精确测量很小的传感器输出电平,因为在超过放大的偏移值之前,ADC输出代码不会高过零值。
第二个挑战是可能针对传感器满刻度输出的输出电压值范围。例如,标称满刻度输出电压为100mV的传感器可能有这样一个指标,它表明了这种满刻度输出低至50mV和高至150mV的可能性。
如果满刻度传感器输出低于标称值,ADC的满刻度范围就不会使用。如果满刻度传感器输出超过标称值,ADC输出将在传感器输出达到其满刻度之前先达到ADC满刻度输出值。此外,如果传感器输出或放大器本身有漂移,那么在读数时将存在某种不确定性和不精确性。
幸运的是,目前的传感器即使有时间漂移也非常小,仔细选择放大器可以使放大器漂移最小。因此,在制造期间和/或系统上电时,电路增益可以一次调整到位。
达到这个目的的方法之一是使用数模转换器(DAC)调整ADC参考电压VREF,以补偿传感器的满刻度误差,使用另一个DAC调整图2中的VOFF以补偿偏移误差。双通道DAC,如国半的DAXxx2S085(其中“xx”可以是08、10或12,代表DAC分辨率),将是这种应用的理想之选。另外一种方法,是在传感器输出被数字化后,用软件校准这些误差。
解决这两个挑战的最佳方案,是在制造过程和系统启动时的软件校准过程中,调整偏移和增益误差。这种方法允许用软件实现最小误差校准,并保持ADC的最大可用动态范围。
第三个问题是,单端ADC通常要求其输入可以被驱动到非常接近零伏,以产生零输出代码。问题产生的原因是,用于驱动ADC输入的放大器不能产生低于50mV左右的输出。即使所所用的放大器具有轨到轨输出能力,这种现象也很常见。
虽然对某些应用来说,电路无法提供最小的ADC零输出代码没什么关系,但对其它应用来说这却是个问题。对于后者,解决方案包括:
* 给驱动单端输入ADC的放大器提供负电源。
* 使用既带正参考电压又带负参考电压的单端ADC,这些参考电压可以设为比器件地高的值,并相应抵消ADC输入电压。
* 将ADC的地偏置到约100mV。
* 偏移ADC输入,丢弃ADC输出端的一些代码,用软件进行调整
* 使用差分输入ADC。
驱动ADC的放大器使用负电源有个缺点,即系统中可能没有负电源,而单为这个放大器提供一个负电源又似乎不太可行。对此,国半公司的开关电容电压反向器LM2787提供了一种简单的解决方案。
所有ADC都有一个正参考电压和一个负参考电压。这两个参考电压之间的差值就是所谓的ADC“参考电压”。负参考和正参考电压分别定义了输入最小和最大电压。遗憾的是,目前许多ADC内部将负参考电压定义为器件地,这是为了将ADC集成在具有更少外部引脚的更小封装中而作出的牺牲。
提高ADC的地电平通常不是件容易的事。另外,将它偏置得太高可能会出现输出接口问题,因为器件的逻辑低电平将比地偏置值高出一些。然而,这样做与将ADC负参考电压定义为低值(也许70mV至100mV)具有相同的效果。
增加ADC偏移并对ADC满刻度输入值作合适调整是一种可行的方法,但会降低ADC使用的动态范围。这样做相当于提供图2所示的正VOFF,减少放大器增益,以便ADC输入不超过ADC参考电压,并对ADC输出代码进行软件调整。
使用差分输入ADC是一种最好的方法,它能获得ADC零输出代码,在ADC输入端的整个输入电压范围内保持良好的电路线性,并且无需在系统中使用负电压。在这种方法中,差分放大器的输出反馈到ADC的差分输入端,无需差分到单端放大器电路。因此这是一种既简单又不失高效的完美解决方案。