本文着重介绍了一种改进算法,即取消相电流传感器且采用滑模观测器实现无位置传感器速度控制。
永磁同步电机(PMSM)是近年来发展较快的一种电机,由于其转子采用永磁钢,属于无刷电机的一种,具有一般无刷电机结构简单,体积小,寿命长等优点[1]。
本文讨论空间矢量控制的永磁同步电机,采用磁场定向算法借助DSP高速度实现对转速的实时控制。由于控制算法必须获取转子位置信息,所以传统的控制系统都需要以光电编码器等作为转子位置传感器。为了最大限度减少传感器,本文从改变相电流检测方法,建立采用砰-砰控制的滑模观测器,介绍一个可以实现的模型。
2 磁场定向原理
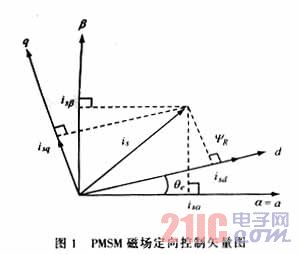
磁场定向控制,简称FOC。如图1所示,两直角坐标系:αβ坐标系为定子静止坐标系,α轴与定子绕组a相轴重合;dq为转子旋转坐标系,d轴与转子磁链方向重合,并以同步速ωr逆时针旋转。两坐标系之间的夹角为θe。可以把定子电流综合矢量is,在旋转坐标系 dq轴上如下式分解
is=isd+isq (1)
在交流永磁同步电机中,转子为永磁钢,可认为转子电流综合矢量的模大小不变,常用常数值IF代表。根据交流电机电磁转矩T与定、转子电流综合矢量的普遍关系式[2]
式中p———极对数
L12———定、转子互感
i1———定子电流综合矢量
i2———转子电流综合矢量
δ———定、转子综合矢量间夹角
这样电磁转矩只随|i1|和角δ变化。为了获得简单可控的转矩特性,可以给定定子电流综合矢量指令使其始终在q轴上,即δ=90°,从而得
![]()
式中Is———定子电流综合矢量的模
按上式可以实现用定子电流综合矢量的模来直接控制电动机电磁转矩,从而使永磁同步电动机获得类似直流电动机的伺服性能,并可得到快速无静差的调节特性。图2为系统控制框图。

该速度控制系统由速度、电流双闭环实现,采用的算法由相应的模块实现,包括:Park变换模块,Clark变换模块,反Park变换模块,转子位置角估计模块,转速计算模块,弱磁控制模块,PI调节模块,空间矢量PWM生成模块等。整个控制系统,以DSP芯片为核心再配以简单的外围电路,其复杂的控制算法及功能全部由软件来实现。其中每一个控制模块,对应一C调用函数,主函数流程用C语言编制。与有位置传感器的控制系统相比,无位置传感器系统仅在对反馈量的处理中采用了转角观测器模块函数,而对其他控制模块,而系统可以以完全相同的方法实现,这更显示了软件构成系统的灵活性。
3 无传感器算法
3.1 减少一路电流传感器方法
在逆变器控制中都需要相电流信息,传统采用的方法是直接用传感器获得需要的相电流,这种方法依赖负载的布置,并且至少需要两个传感器直接应用于电机组绕组。本文介绍的方法是仅通过采集直流侧母线电流信息,来估计交流侧三相电流值。因为逆变器开关状态是我们直接控制的,所以已知输入电流的路径,即输入线电流和电机相电流间的关系。这样在通常八个开关状态(Sa,Sb,Sc)中除(0,0,0)和(1,1,1),在其他六个开关状态下,直流侧线电流信息总对应a,b,c中某一路相电流值。

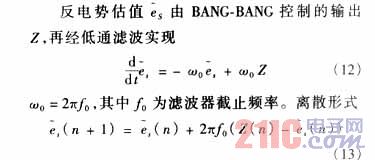
式(8)为基本电流观测器,式(9)为BANG-BANG控制器。二者组成滑模电流观测器,目的是通过适当选择Z和估计反电势,使估计电流和实测电流误差为零。二者离散形式为

(2)估计反电势
(3)转子磁链位置θ估算
由反电势来估计转子磁链位置角,式(14)为反电势综合矢量表达式,可根据反电势在α、β轴上的分量来求解转子磁链位置角,即式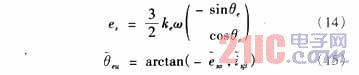
(4)转子磁链位置校正
采用低通滤波器来获得反电势,引入了相延迟。该延迟与低通滤波器的相位响应直接相关,其截止频率越低,对应固定频率的相延迟越大。
基于低通滤波器的相位响应,做一个相延迟表,可以通过查表求得运行时对应指令速度(频率)的相移角。该相移角加上得到。
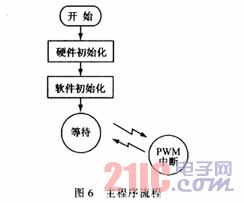
4 系统软件流程
主程序流程如图6所示,只完成系统硬件和软件的初始化任务,然后处于等待状态。完整的FOC控制算法在PWM中断服务程序中实现。在一个中断周期内,流程依照系统控制框图图2,从一路AD采样电流,计算转子位置角,计算转速,完成所有反馈通道计算后,再调用正向通道中计算模块函数,最后输出三相逆变桥的空间矢量PWM波信号。