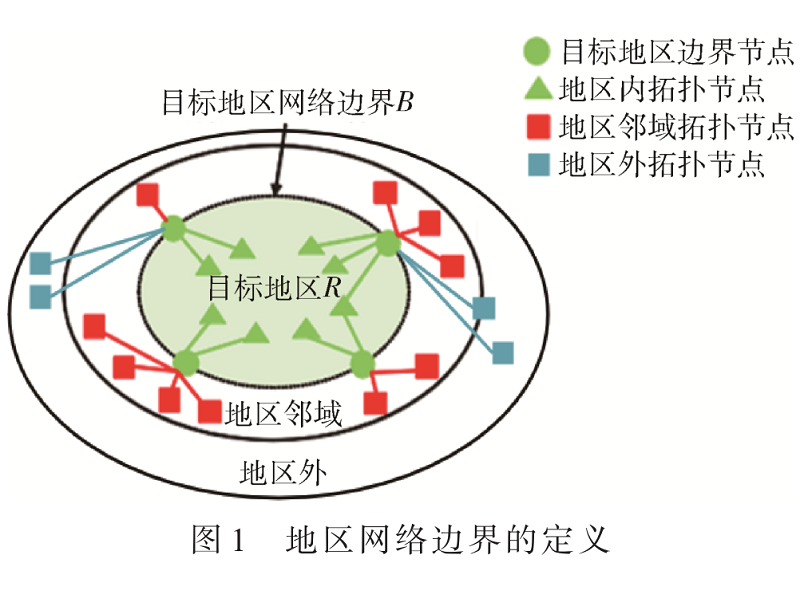
区域网络边界识别技术研究[通信与网络][通信网络]
发表于:2025/10/28 下午3:30:01
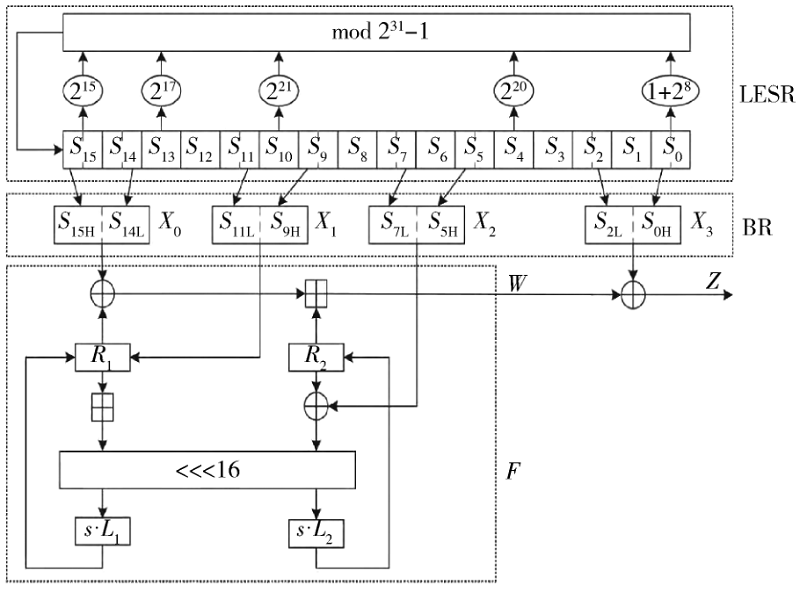
基于FPGA的ZUC算法快速实现研究[可编程逻辑][数据中心]
发表于:2025/10/28 下午3:21:01
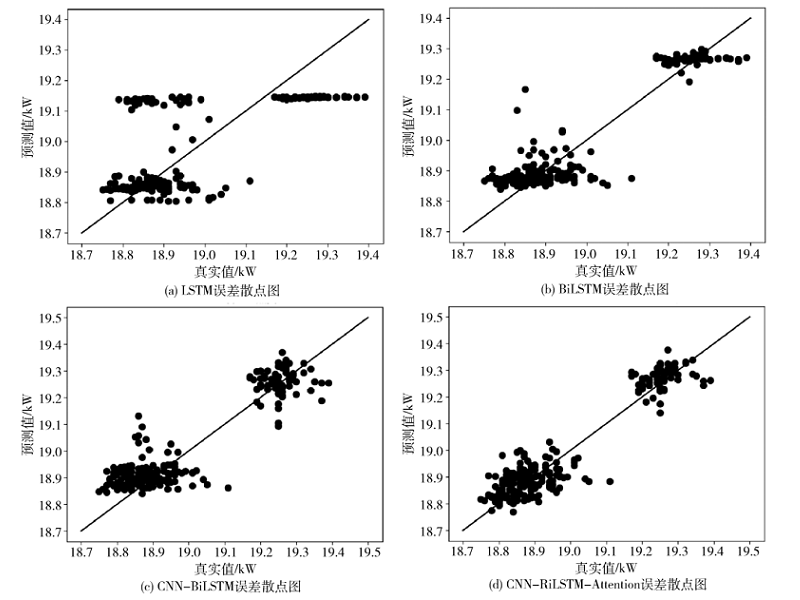
基于CNN-BiLSTM-Attention的工业数据中心IT设备能耗预测模型研究[模拟设计][数据中心]
发表于:2025/10/28 下午3:10:02
低温度与工艺增益误差的可变增益放大器设计[电源技术][物联网]
发表于:2025/10/28 下午2:40:00
LDO启动浪涌的反馈网络优化抑制方法研究[电源技术][航空航天]
发表于:2025/10/28 下午2:31:00
基于SM2的SoC安全芯片双向身份鉴别技术研究[模拟设计][工业自动化]
发表于:2025/10/28 下午2:21:00

一种宽输入低纹波电荷泵负压电源芯片设计[电源技术][工业自动化]
发表于:2025/10/28 下午2:01:33