
随着经济的快速发展和城市高层建筑的不断涌现,人们对供水质量和供水系统可靠性的要求不断提高,加上目前能源紧缺对节能的要求,因此利用先进的电子测控技术和自动化控制技术,设计高性能、高可靠性、低成本、低能耗,以及能适用不同领域的恒压供水系统也就成为必然趋势。随着近年来变频调速技术的飞速进步,变频恒压供水也在其基础上慢慢发展起来,并成为一种新兴的现代化供水技术。
目前,国外的恒压供水工程设计都采用一台变频器只带一台水泵机组的方式,几乎没有用一台变频器拖动多台水泵机组运行的情况,这种方式不但投资成本较高,且功能单一。
为此设计了在变频调速控制系统中加入基于C8051F410的单片机系统,构成了功能更强的复合控制系统,它不但克服了以上缺点,而且具有安装调试方便,功能全面,可靠性高。抗干扰能力强等优点,且可以广泛应用于工业生产、社会生活的各个领域。
1 控制原理
在恒压供水系统中,安装于管网的远传压力表提供水压力信号,并经过光电隔离和电压转换电路,传送给系统的中心控制器,控制器将采集到的压力数据与预设压力进行比较,得出偏差值,再经PID运算之后得出控制参数,D/A模块将控制参数转换为模拟电压输出,调节变频器的输出频率,从而控制水泵的转速,以保证管网压力基本恒定。当用水量增大时,管网压力低于预设值,变频器频率就会升高,水泵转速加快,从而提升管道水压,但若达到水泵额定输出功率仍无法满足用户供水要求时,该泵自动转换成工频运行状态,并变频启动下一台水泵;反之,当用水量减少,则降低水泵运行频率直至设定的下限运行频率,若供水量仍大于用水量,则减泵直至全部泵停止工作,经过一定的延时,控制器重新比较压力,并计算控制输出,从而维持恒压供水。它的系统原理框图如图1所示。

该系统可以同时控制2台水泵,根据不同的场合可以采用不同的运行模式,如单泵运行、一用一补、一工一变、定时换泵等。
2 系统总体方案
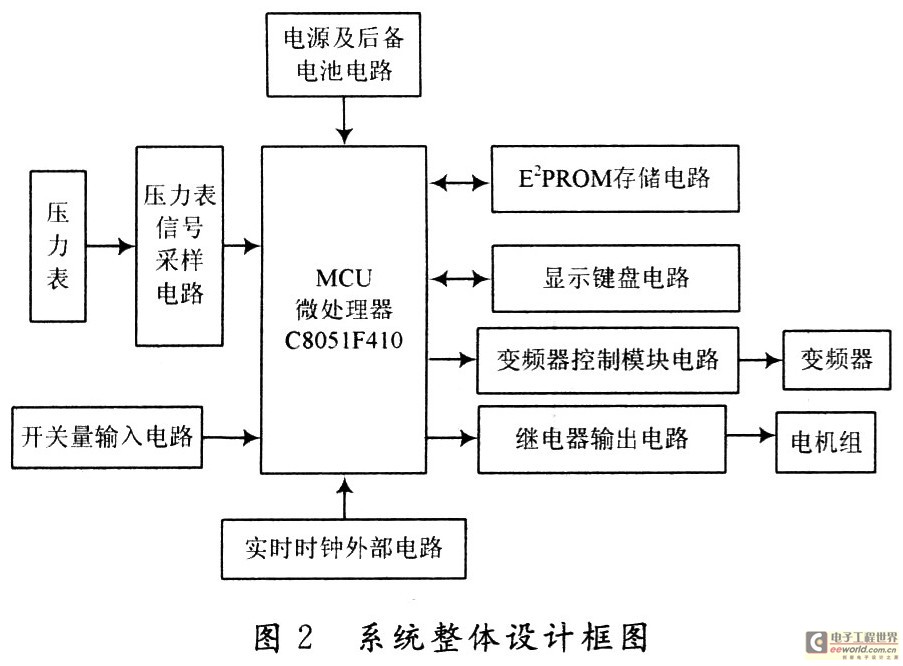
系统的硬件和软件采用模块化、标准化设计,并充分考虑系统的扩展能力。控制器由主控板、显示按键面板和电源板三部分组成。图2是控制器的结构框图,其工作原理是:首先用户通过显示按键面板设定预设压力和控制器运行的各个功能参数,保存至E2PROM存储器用作掉电存储,位于用户管网端的远传压力表输出的电压或是电流信号经过采样电路转化为数字量,送入单片机与预设压力进行比较,计算并输出模拟控制量和继电器输出状态量。其中,模拟控制量输出经过变频器控制模块电路送给变频器,用以控制变频器的输出频率;继电器输出状态量经过继电器输出电路送给继电器组,用以控制各个泵工作于工频或是变频状态。最后单片机把实际压力值、预设压力值、输出频率和各个泵的工作状态送到显示面板,以便用户进行观测和操作。
3 系统单元电路
3.1 主控制器的选择
主控制器选用单片机C8051F410,它是一款完全集成的混合信号片上系统型芯片,其内部还集成了12位高速ADC模块和电流输出型DAC模块,同时硬件实现的SMBus和UART串行接口,能方便处理器与E2PROM通信和数据串行输出。C2805lF410还支持JTAG实时仿真和跟踪,能够进行非侵入式(不占用片内资源)的全速在系统调试。
3.2 系统电源电路
该设计采用基于三端稳压芯片TOP221Y的高精度开关稳压电源电路,主电路拓扑结构选用单端反激式直流变换电路,其输出采用两组直流低压电源:主回路为系统的数字电路部分提供5 V直流电源,副回路为系统的模拟部分提供15 V直流电源。
3.3 压力表信号采集与光电隔离电路
位于用户管网的压力传感器监测到的压力信号经过光电隔离电路进行滤波和隔离处理后,进入C8051F-410内部的ADC模块,实现按比例转换,转换为12 b数字量,以供单片机对其信号进行处理和计算。为了保证输入量与转换量程相称,充分发挥A/D转换器的分辨率,在对压力信号进行A/D转换之前经过光电隔离电路时,就已将外部传入的O~5 V模拟电压转换为O~2 V模拟电压信号。电路原理如图3所示。
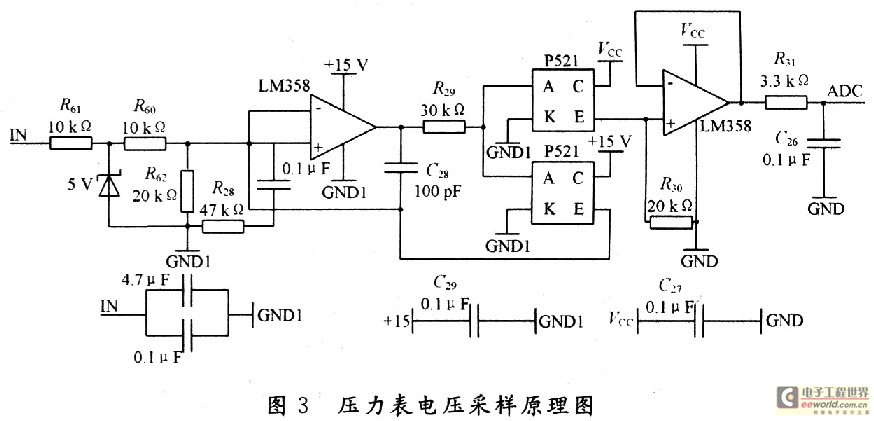
由图3可见,外部电压信号从IN端口接入,经过隔离和滤波电路,转换为O~2 V电压,从ADC端口送入单片机。同时在模拟信号采集到单片机系统的过程中,各种干扰信号都会随着被测量信号进入MCU控制系统,这些信号迭加在有用的被测信号上会降低测量的准确度,造成控制系统的不稳定。以上电路设计便利用线性光耦进行光电之间的相互转换,利用光作为媒介进行信号传输,在电气上使测量系统与现场信号完全隔离,从而实现了电平线性转换且不把现场的电噪声干扰引入到控制系统中。
3.4 控制变频器输出电路
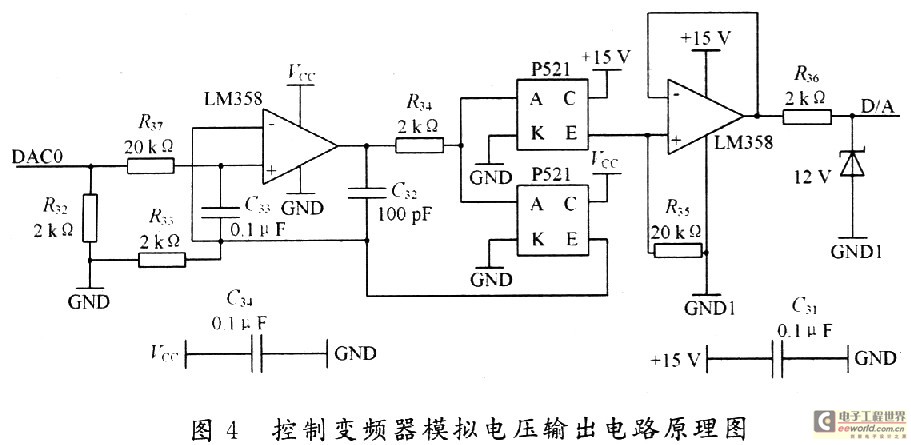
单片机通过内部的电流输出型数/模转换模块(IDAC),将计算得出的数字量转化为模拟电压输出,其输出电压经过滤波和比例转换处理后用来控制变频器的频率。同时为了保证单片机IDAC输出电压稳定可靠,不受干扰,外部电路同样采用了光电隔离电路,其电路原理图如图4所示。
3.5 外扩E2PROM存储器电路
该设计采用Atmel公司的E2PROM芯片AT24C02,其体积小,性能优,使用灵活方便,能够在系统掉电之后存储一些用户设定和运行的状态参数,以便重新启动机器之后读取。处理器自身集成的SMBus兼容I2C接口,可以直接与AT24C02通信,此方案不仅设计单,工作可靠,而且成本低廉。电路原理如图5所示。

3.6 继电器控制输出电路
主控制器驱动5个灵敏继电器K1~K5,分别控制1个泄流阀和2个泵电机,实现对泄流阀的打开与关断控制和泵的变频或工频状态切换。单片机通过信号线RX与TX将继电器状态控制信号串行输出给串行移位寄存器芯片74HC595D,由74HC595D将输出状态的硬件锁存,以防止输出状态被干扰,最后通过达林顿管ULN2003提高驱动能力,以控制水泵电机的工作状态和泄流阀的动作。
4 控制器的软件设计
该设计中对变频器输出频率的调节采用PID控制算法,其控制算法就是对偏差的比例、积分和微分。它是连续系统中技术成熟,应用最广泛的一种算法,特别是在工业控制中,因为控制对象的精确数学模型很难建立,系统参数又经常发生变化,因此常采用PID控制算法,其控制示意图如图6所示。
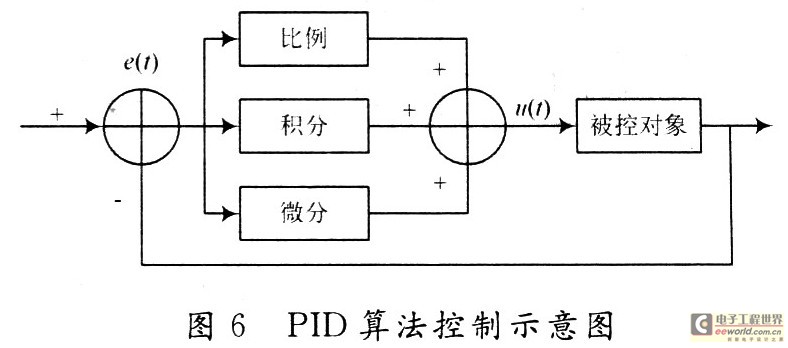
它的数学表达式为:

式中:KP,KI和KD分别为比例系数、积分系数和微分系数;e(t)为误差。
式(1)离散化后可以用计算机很方便地实现,其位置式PID控制规律的数学表达式为:
式中:e(j)为第j次采样的误差值;T为采样周期。
在实际应用中,一般选择增量式PID控制规律。因为增量型算法与位置型算法相比,前者不需要做累加,不易产生大的累加误差,而且得出的是控制量的增量,误动作的影响比较小,更易于实现手动到自动的无冲击切换。增量式数字PID控制算式为:
在该设计中,执行机构采用变频器,由于采用增量式数字PID控制算法,所以对于每个采样周期,控制器输出的控制量都相对于上次的增加量,其系统控制算法流程如图7所示。
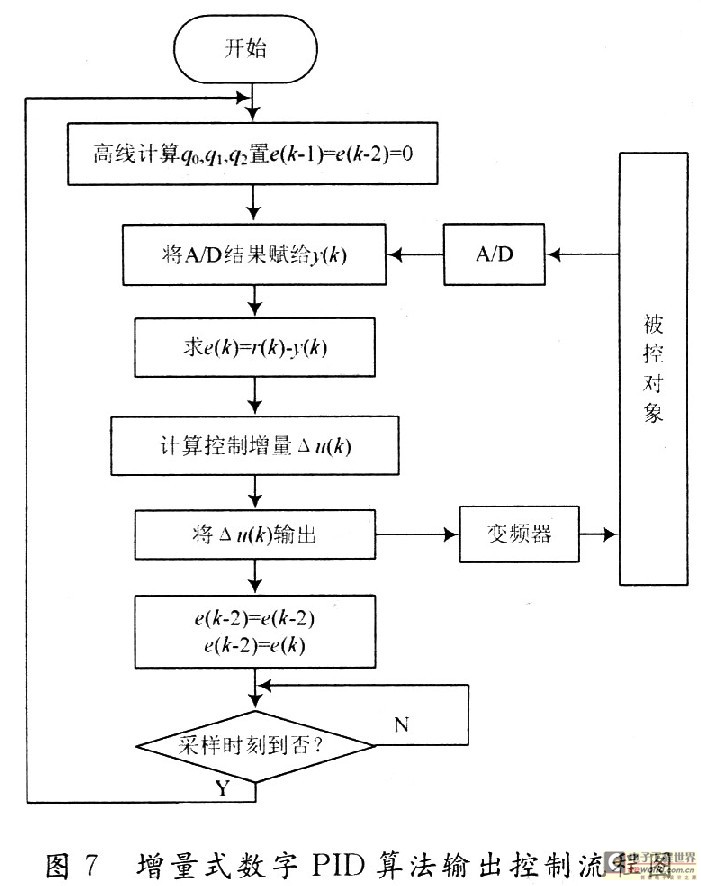
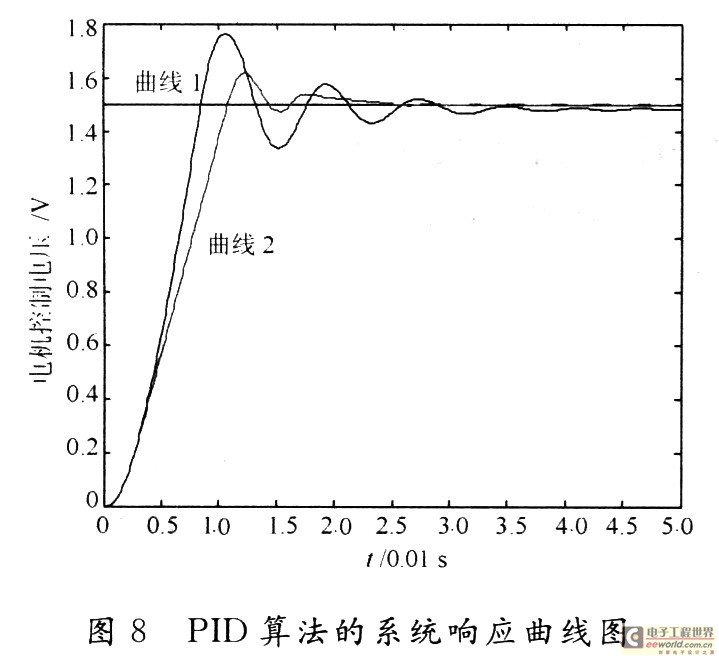
图7为增量式数字PID算法在整个系统中的控制流程,每次进入A/D定时采集中断,压力信号便会被转化为数字量,PID控制模块便将压力信号的数字量通过算法处理得出相应的控制输出数字量,接着启动D/A将数字输出转换为模拟电压输出,其模拟电压输出用以控制变频器。此模块配合继电器开关输出模块和压力采集模块,通过相应的控制策略实现实时测量和控制,保持供水管网压力的动态平衡。为了方便现场调试,在设计中使PID调整的上升、下降和跟踪采样周期的设定值可变,可以在开机时通过键盘改变其值,从而改变PID参数,以适应不同场合的控制需要。如图8所示,曲线1是参数调整前电机模块控制电压随时间变化的响应曲线;曲线2为参数经过多次调整之后的响应曲线。可以看出,经过参数调整,系统的响应性能有了较大的提高,所以在实际应用环境中需要经过多次调整设定值,以保证达到最佳的控制性能。
5 结语
分析了智能给水控制器的软件和硬件设计。该控制器以SoC单片机C8051F410为核心,实现了对管网压力的采集,对变频器输出的控制,而且拥有独特灵活的用户界面。控制器不但采样和控制精度高,而且有多种保护和抗干扰功能,保证了控制器的稳定性和安全性。采用控制器和变频器构成的恒压供水系统,不仅大大提高了供水质量,而且节能降耗效果也较为显著,在当今国家能源紧张的情况下,具有重要的现实意义。