
1 引 言
传感器作为自控系统的前沿哨兵,犹如电子眼一般将被测信息接收并转换为有效的电信号,但同时,一些无用信号也搀杂在其中。这些无用信号我们统称为噪声。
应该说,噪声存在于任何电路之中,但它对传感器电路的影响却尤为突出。这是因为,传感器的输出阻抗一般都很高,使其输出信号衰减厉害,同时,传感器自容易被噪声信号淹没。因此,噪声的存在必定影响传感器的精度和分辨率,而传感器又是检测自控系统的首要环节,于是势必影响整个自控系统的性能。
由此,噪声的研究是传感器电路设计中必须考虑的重要环节,只有有效地抑制、减少噪声的影响才能有效利用传感器,才能提高系统的分辨率和精度。
但噪声的种类多,成因复杂,对传感器的干扰能力也有很大差异,于是抑制噪声的方法也不同。下面就传感器的噪声问题进行较全面的研究。
2 传感器的噪声分析及对策
传感器噪声的产生根源按噪声源分为内部噪声和外部噪声。
2.1 内部噪声——来自传感器件和电路元件的噪声
2.1.1 热噪声
热噪声的发生机理是,电阻中自由电子做不规则的热运动时产生电位差的起伏,它由温度引发且与之呈正比,由下面的奈奎斯特公式表示:
![]()
其中,Vn:噪声电压有效值;K:波耳兹曼常数(1.38×10-23J·K-1);T:绝对温度(K);B:系统的频带宽度(Hz);R:噪声源阻值(Ω)。
噪声源包括传感器自身内阻,电路电阻元件等。
由公式(1)可见,热噪声由于来自器件自身,从而无法根本消除,宜尽可能选择阻值较小的电阻。
同时,热噪声与频率大小无关,但与频带宽成正比,即,对应不同的频率有均匀功率分布,故,也称白噪声。因此,选择窄频带的放大器和相敏检出器可有效降低噪声。
2.1.2 放大器的噪声

2.1.3 散粒噪声
散粒噪声的噪声源为晶体管,其机理是由到达电极的带电粒子的波动引起电流的波动形成的。噪声电流In与到达电极的电流Ic及频带宽度B成正比,可表示为:
![]()
由此可见,使用双极型晶体管的前置放大器来放大传感器的输出信号的场合,选Ic取值尽可能小。同时,也可选择窄频带的放大器降低散粒噪声电流。
2.1.4 1/f噪声
1/f噪声和热噪声是传感器内部的主要噪声源,但其产生机理目前还有争议,一般认为它是一种体噪声,而不是表面效应,源于晶格散射引起。在晶体管的P-N附近是电子-空穴再复合的不规则性产生的噪声,该噪声的功率分布与频率成反比,并由此而得名。其噪声电压表示为:
![]()
Hooge还在1969年提出了一个解释1/f噪声的经验公式:
![]()
式中,SRH和SVH为相应于电阻起伏和电压起伏的功率噪声密度,V为加在R上的偏压,N为总的自由载流子数,α叫Hooge因子,是一个与器件尺寸无关的常数,它是一个判断材料性能的重要参数。
对于矩形电阻,总的自由载流子数N=PLWH,其中,P为载流子浓度,L、W、H为电阻的长、宽、厚。
因此,我们可以得出:1/f噪声与力敏电阻的几何参数有关,一般对某确定的材料,扩大电阻面积可以使N增加、减小1/f噪声。同时,实验表明:一味增加尺寸将降低灵敏度,增加噪声谱振动幅度,而选L/W=10,L在100μm~200μm较合适。
同时,1/f噪声与材料也有关。实验表明:单晶硅明显好于微晶硅,而微晶硅略好于多晶硅。主要原因在于,单晶硅具有较完整的晶格结构。材料因数引起的1/f噪声除了晶格缺陷外,材料中的氢原子或原子团的移动和晶粒的边界也是引起1/f噪声的另一个主要原因。
由以上公式可知,载流子浓度与1/f噪声成反比,而不同的掺杂浓度对应着不同的载流子浓度,因此掺杂浓度也是影响1/f噪声的因数。实验表明,掺杂浓度每增加10倍,1/f噪声降低36%~50%,但最佳搀杂浓度一般选为5×1015cm-2。
2.1.5 开关器件产生的噪声
一般在使用模拟多路开关使众多的传感器输出交替使用一个放大器电路的场合(如MOS型图像传感器),开关的开、合产生相应的噪声干扰,而叠加到输出信号中。
对开关噪声的抑止通常用设置相应的伪传感器电路的方法。
2.2 外部噪声
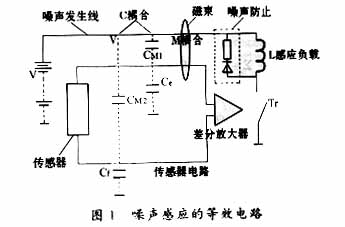
外部噪声是由传感器电路外的人为或自然干扰造成的。主要原因就是电磁辐射。其噪声源十分广泛,几乎包括所有的电气、电力机械,还有雷电、大气电离等自然现象,同时,系统中的模数部分有公共接地、公共电源时,数字信号的频繁电流变化在模拟电路中产生噪声,它们通过静电耦合、电磁耦合和漏电电流等形式存在于传感器的电路中,如图1所示。
2.2.3 隔 离
隔离是为了将前后两个电路的信号接地端从电路上隔开,因为它们容易形成环路电流,引起噪声干扰。隔离的主要方法是采用变压器和光电耦合器。变压器隔离只适用于交流电路,在直流或超低频测量系统中,常采用光电耦合隔离。
2.2.4 输出线、电源线、配线、布线的要求
传感器的输出线应相互扭绞,以减少外界磁力线的影响。同时,输出线尽可能短些。
如噪声电流流入电源线和配线,就会放射噪声磁场,也会受噪声源的电磁场感应拾取噪声,即容易起噪声的发送和接收作用。因此,必须使各配线不具备天线效应。双股线和绞线可消磁场,但不能完全消除静电效应。同轴电缆就可同时消除电磁场。
环状布线时,与环状交叉的磁力线所引起的电动势会产生噪声。因此,布线应尽可能使电流的进出导线不靠近且呈扭绞状。
平衡-不平衡变压器对共模噪声呈高阻抗,对正常噪声呈低阻抗,从而在从不平衡布线至绞线所引起的平衡布线的过程中吸收了噪声。
2.3 降低噪声的信号处理电路
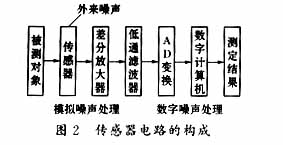
传感器电路首先需要将采样的微弱信号进行放大。但同时并存许多噪声源:传感器内阻、电缆电阻、放大器电路以及电路周围的电磁干扰源。因此,通常用低通滤波器和差分放大器等来抑制差模噪声和共模噪声(如图3所示)。
2.3.3 相位检波电路
在预知信号为周期性时,可采取与信号周期同步地取样输出以提高信噪比。虽然噪声是随机的,但经N次取样后,信噪比可改善N1/2倍。其原理图如图7所示。
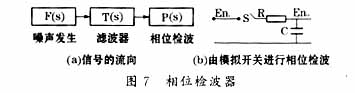
若信号和开关周期T,一周期中关闭时间为ΔT,在τ=CR》T的条件下,电容二端的噪声电压为:



2.3.4 数字信号处理
数字信号处理技术(DSP)利用微计算机、单片机、DSP芯片等硬件,以数值计算为基础编写软件来实现对信号的处理。它具有精确、抗干扰强、速度快等优点,是模拟信号处理技术无法比拟的。作为一门新兴学科,数字信号处理技术在信息时代得以迅速发展,成为传感系统滤波的又一先进方法。
3 结束语
传感器的噪声抑制了其精度的有效实现,成为传感器电路不得不重视的问题。但通过对传感器噪声源的分析,完全可以用相应的方法和信号处理电路来进行有效的抑制,保证传感器正常工作。