
多自由度的控制是一个复杂,而具挑战性的。Energid开发的Actin 是 C++ 软件工具箱,它通过提供软件组件和控制方法使复杂的机械控制和模拟简单化。Actin 软件最初是为美国宇航局设计的,它可以为上百个运动部件组成的固定和移动的机器人提供协调控制的Windows基础的库。 软件设计人员运用库可以很快地设计出复杂,智能型的控制系统。软件设计人员还可以指定机器人做所希望的运动学动作,Actin 自动生成算法从而设定关节的位置和速度实现指定的机械手的运动。
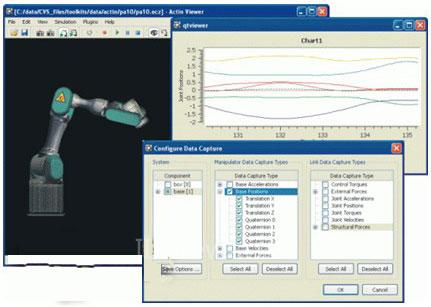
ACTIN 机器人学工具箱界面
借助于Actin, 机器人专家们可以把精力放在机器人该做什么,手和工具应该放在哪,而不是该怎样实现所要求的动作。对于具有很多运动部件的复杂的机械结构,机械手实现一种动作,机械臂可以有不同运动的方法。比如说,人的手臂,手的位置和方向一定时,肘部可以有不同的运动。Actin就是利用这种运动学的冗长性自动生成智能控制,包括避开碰撞,关节角度的限值。能量最小运动和抵抗环境外力的能力最优化。
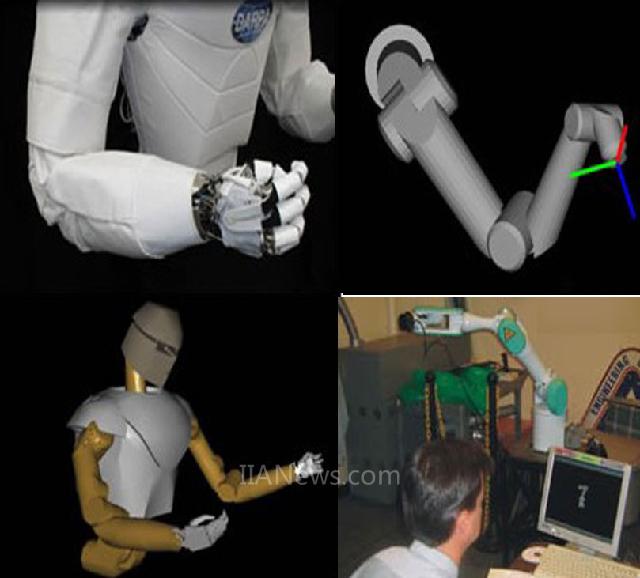
通过可设置的面向对象的设计, Actin 可以应用于多种机器人。它可以既可以应用于固定式的工业机器人,比如说,工厂自动生产线的机器人。也可以应用于移动式的机器人,比如说,家庭和娱乐用机器人。Actin适用于很多种型式关节和手。 它可以仿真和控制无限个自由度和分支联接的结构。
ACTIN 工具箱的优点
·协调控制– 可应用于固定和移动机器人
·智能型运动– 能够避免碰撞,抵抗外力最优化
·前所未有的灵活性– XML为基础的设定使Actin能够快速的变化以适应工作要求
·降低设计成本 – Actin 的交叉平台,C++接口和容易使用的优化控制结构赋予设计者更大的能力
· 快速设计检验–SolidWorks 能够被用于设计和模拟。只需简单操作就可使设计合理性得到检验
·程序的重复使用性– 为一种应用开发的控制算法可以应用于其它的方面
·交叉平台的技术支持– 可支持Linux and Windows
ACTIN 工具箱的能力包括
·动态模拟任何台数的机器人
·蒙地卡罗(Monte Carlo)仿真分析
·模拟柔性关节• 视觉演示机器人
· 控制系统的表达用可扩展标记语言(XML)
· 生成 XML 格式描述控制系统
· 控制系统通过网络连接和通信
· 可以结合机械视觉
·可执行力的控制
ACTIN 工具箱的控制算法
· 碰撞避免
·关节角度限值避免
·特异性避免
·误差减少
·抵抗外力能力优化
·最小动能控制
·最小潜能控制 失败恢复
·仿真为基础的控制
·用户定义
关于Energid Technologies
Energid Technologies是一家重点解决具有挑战性问题的机器人和机械视觉工程学的公司。客户包括机器人制造商,美国国防部多个分机构,和美国宇航局的多个研究中心。 公司成立于2001年,总部在美国马萨诸塞州的剑桥。更详细的情况,请访问 www.energid.com.