
摘要:目前在导航接收系统中,通常需要控制盒来完成对机载设备的加电、工作频率或波道的转换、系统音量、显示亮度等功能的操作与控制。文中介绍某导航控制盒的应用范围、工作原理及电路实现,主要从频率控制、关键器件HCMS2924点阵模块的使用方法等方面进行了详细的论述。
关键词:BCD码;频率控制;ARINC 429总线;看门狗;E2PROM;LED点阵显示
导航就是引导一个运动体从一点到达另一点的全过程。飞机导航的目的在于保证其从开始起飞到着陆全过程安全、有效、经济的飞行。导航控制盒是机载导航设备的操作控制机构。本项目是基于ARINC 429总线数据格式的导航接收机的控制机构,ARINC429串行总线具有传输速率高,抗干扰能力强的特点,符合航空数字信息传输系统的要求。
该系统将导航接收机的所需的频率以ARINC 429总线数据格式输出,其中信号格式为BCD编码格式,频率范围是108.00~117.95 MHz,频率间隔50 kHz,通过它可以实现对设备的加电控制、可手动控制频率或工作波道的转换、可完成系统音量调节、显示亮度的调节并显示当前频率,根据系统的控制要求,实现两个分系统间控制盒的转换与数据交换功能。
1 实现过程
1.1 控制盒的电路实现
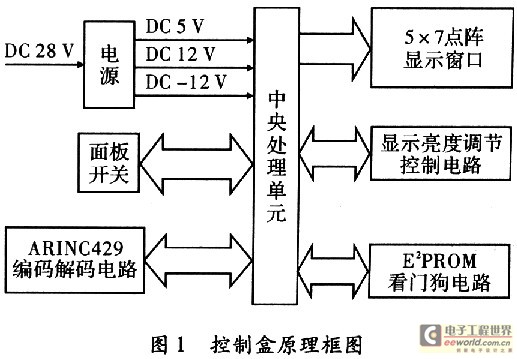
控制盒通过“按钮”对频率进行选择,单片机在主程序中对按钮的开关状态进行扫描,根据扫描到的情况实现相应的频率控制。在控制盒中应用了一个可编程看门狗E2PROM,防止万一因强烈干扰而使CPU程序运行出错时,它能在可编程的超时周期(200 ms)内使CPU复位,回到正常的程序状态。单片机还可以读取存贮于看门狗电路的频率,使控制盒能记忆上次关机的工作状态。显示窗口的亮度可以调节。频率显示采用了5×7点阵模块来显示。单片机将频率代码转换成BCD码格式,通过ARINC429数据的格式,送到导航接收机。
原理框图如图1。
1.2 信号BCD码在ARINC 429中的位置及格式

在发送ARINC 429数据时,首先把频率数据转换成BCD码的格式,再进行相应的判断和计算后保存到发送ARINC 429数据的数组里,最后循环发送出去。相反,在接收ARINC 429数据后,先保存在接收ARINC 429的数组里,然后进行计算判断,如接收的数据正确,再把信号数据提取出来,进行相应的处理和显示。
1.3 频率的控制
控制盒刚开机时,记忆并显示上次断电时的频率,此功能通过读写看门狗来实现。X25045是有4 kB的串行E2PROM,由一个用四线构成的SPI总线方式进行操作,其擦写周期至少有l 000 000次,其特有的看门狗功能具有总线监控和电压监控功能,具有良好的性能价格比。
频率选择采用按钮输入法,按MHz/kHz选择按钮,选择M位或k位,被选择位处于闪烁状态,再按“↑”或“↓”按钮,相应位的数据进行增减。当数据达到最大值时,再按“↑”按钮,显示频率回到最小值。同样,当数据达到最小值时,再按“↓”按钮,显示频率回到最大值。M位时数据步进量为1 MHz,k位时数据步进量为50 kHz。在以上操作过程中,控制盒不发送ARINC429数据(即默认上一状态),若5 s内没有按以上提到的任何按钮,控制盒开始发送现在显示的频率的ARINC429数据。
1.4 显示模块的电路实现
用2块5×7 HCMS2924点阵模块显示108.00~117.95MHz范围的频率,该产品采用低功耗的CMOS工艺。它与TTL电平兼容,可以直接与微处理器和微控制器相连而无需接口电路和元件。该显示屏的特点是可以在水平和垂直方向灵活组合,2块点阵模块的连接关系,如图2所示。 P3.7、P2.6和P3.4口线分别控制HCMS2924的DIN端、CE端和RS端。首先,RS置低以选择点阵寄存器,接着将CE也置为低。然后在每一个时钟上升沿将数据从DIN移入点阵寄存器,移入的数据是高电平时,相应的点被点亮。当所有160位都被移入时,CE置高。当CLK的下降沿到来时,新的数据将被锁存到显示点阵驱动电路。待前面的数据显示完成后,再将数据装载进点阵寄存器。重复5×8×8次后,数据通过DIN端写入到寄存器中。

在4 bit的显示屏中,160位二进制数可由20列8行的矩阵构成。每个字符一般被定义成5×8的点阵,但8行中只有7行有LED点,第0行实际上从不显示,如图3所示。字符一般通过顺序方式载入,首先被载入的是最左边的数据,最后被载入的是最右边的数据。
显示亮度可以用软件编程修改控制字的方法实现。该控制寄存器由两个独立的7位控制字(控制字0和控制字1)组成,由寄存器的D7位决定选择哪一个控制寄存器,D7位为L时选择控制字0,D7位为H时选择控制字1。控制字0的D0~D3位通过脉宽调制(PWM)来调整显示亮度,D4~D5位通过控制像素的峰值电流来调整显示亮度,D6位选择正常操作模式(D6=H)或睡眠模式(D6=L)。控制字1有两个功能;D0位用于选择串行/并行数据输出模式;D1位用于外部振荡器前定标。
1.5 部分子程序
接收和发送子程序如下所示。
1.5.1 从X25045接收1 bit

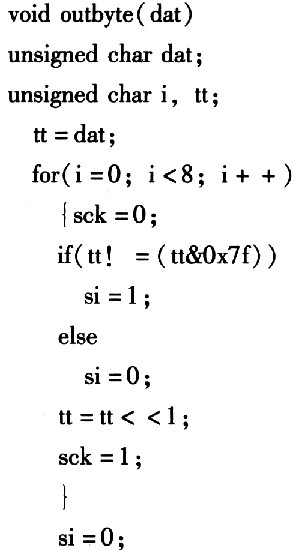
1.5.2 向X25045发送1 bit
2 导航控制盒的应用效果
该控制盒与原同类设备的控制盒相比较,有以下几项优点:
(1)采用了先进的微处理机技术和数据存贮技术,使得产品具有功能强、操作方便、技术先进、可靠性高等特点;本次控制盒的频率选择功能通过软件实现,原同类控制盒大多采用多层波段开关来实现频率选择,电路复杂且可靠性差。
(2)频率显示采用两块点阵模块显示,若按原控制盒的设计方法,完成同样功能,则需要14个数码管;
(3)鉴于以上两点,该控制盒硬件电路简化,重量是原来的1/2,体积减小到原来的2/3,这对于机载设备的减重及小型化有益。
3 结束语
文中阐述了控制盒的工作原理和软硬件设计方案,设计思想新颖、结构简明。将控制盒与系统连接进行了功能测试。结果表明该系统具有反应速度快、可靠性高、可维护性,较好地满足了系统的工作要求,对需要实现此功能的同类控制装置,具有一定的借鉴意义。