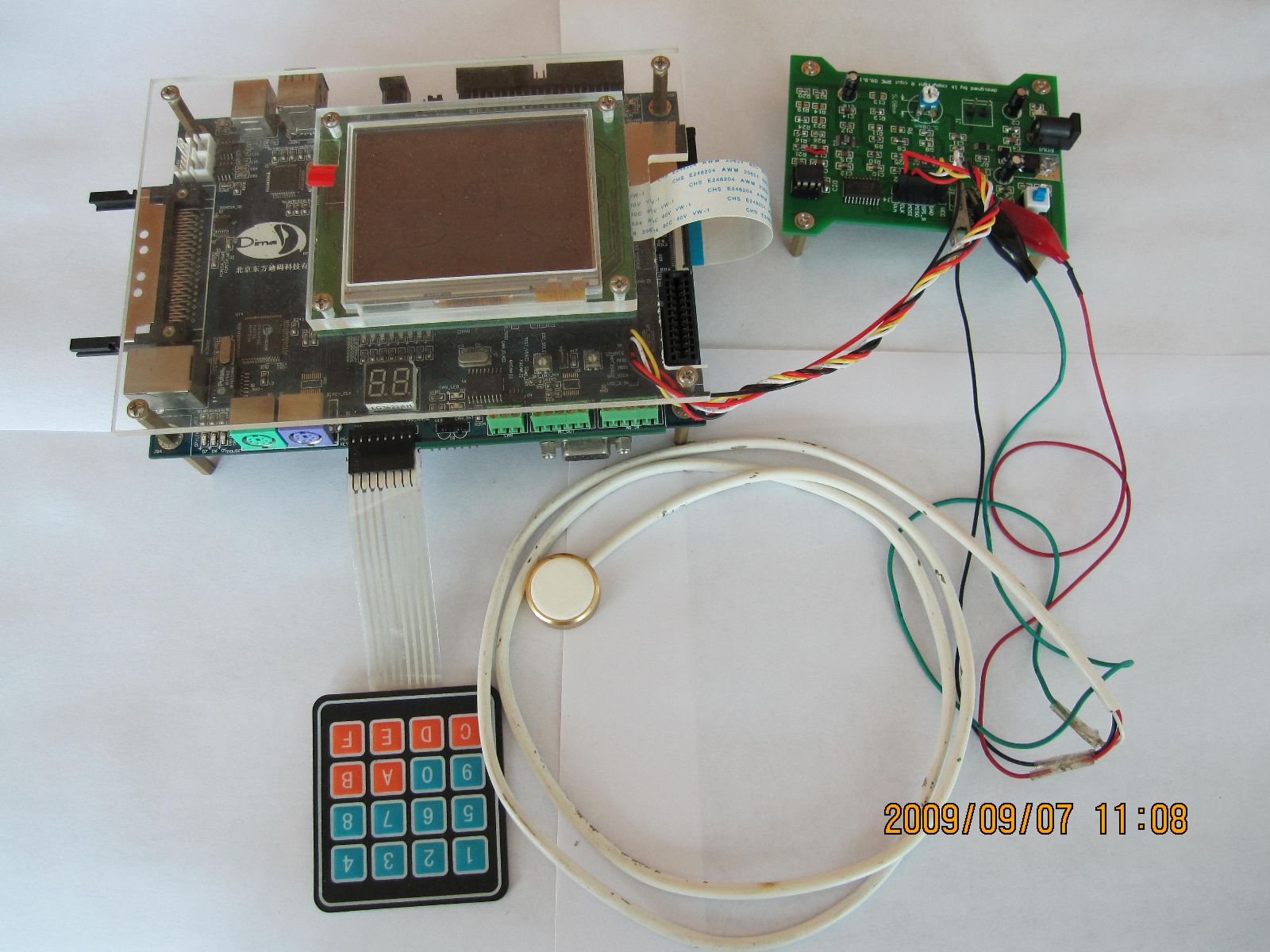
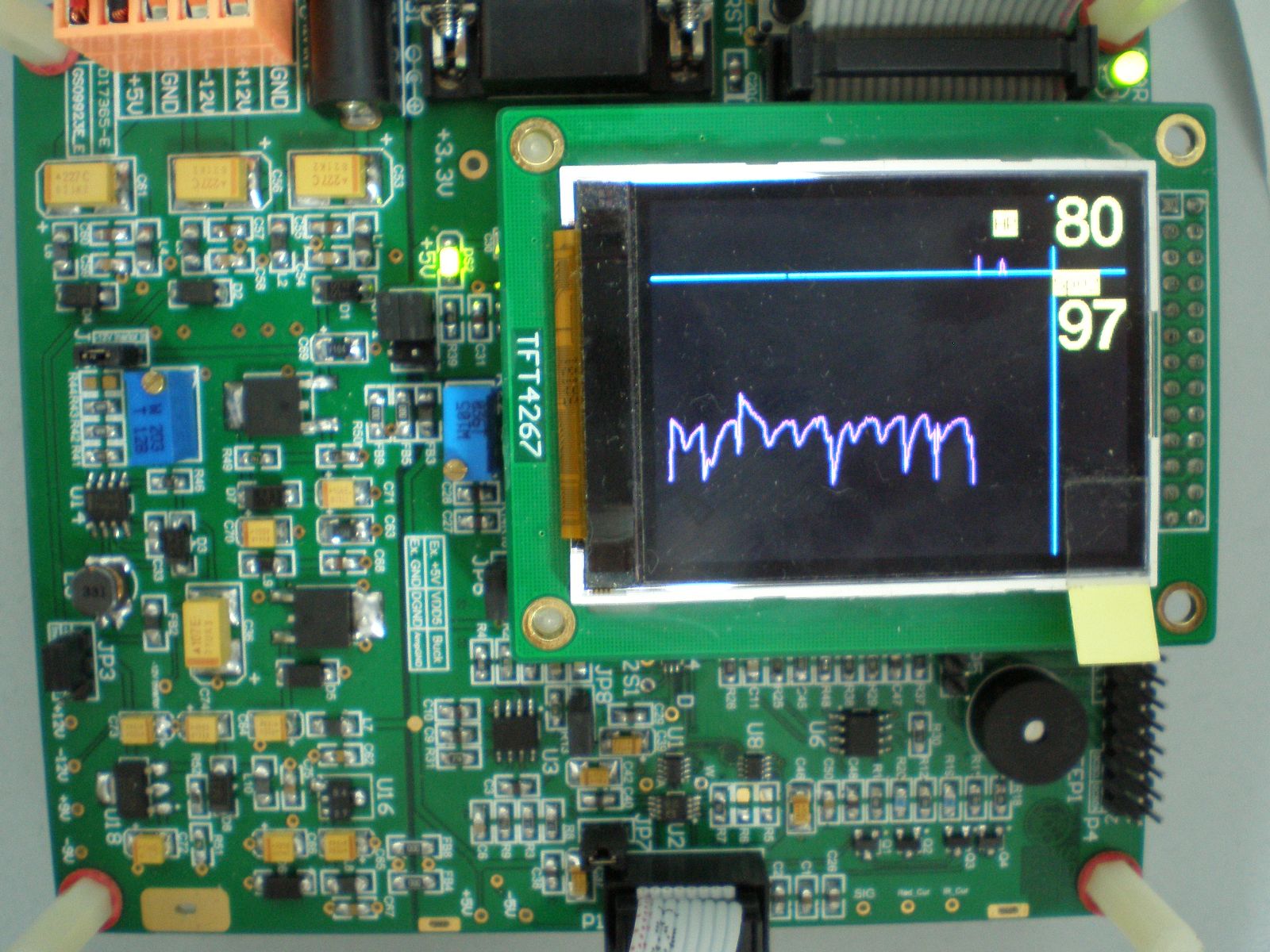
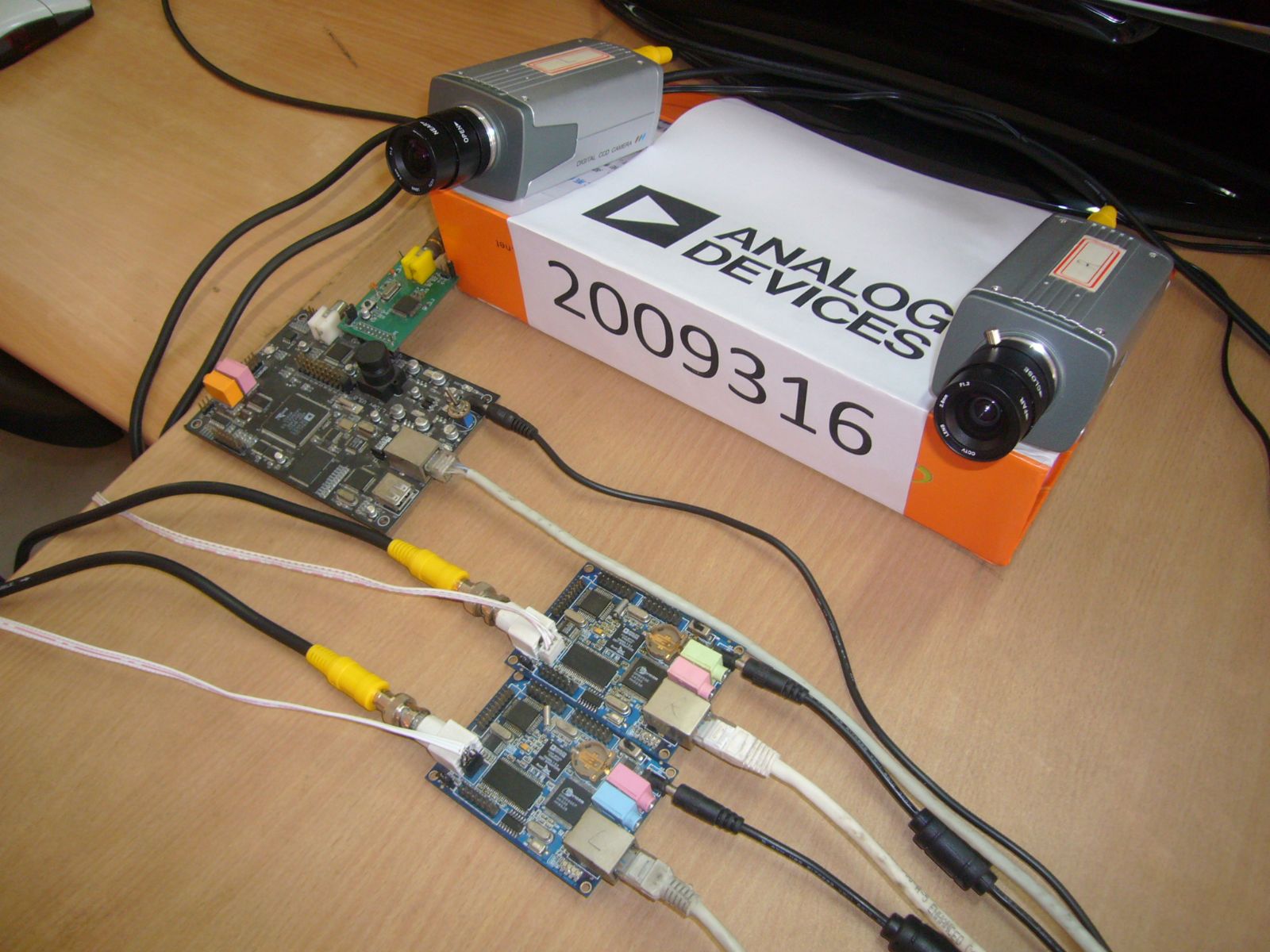
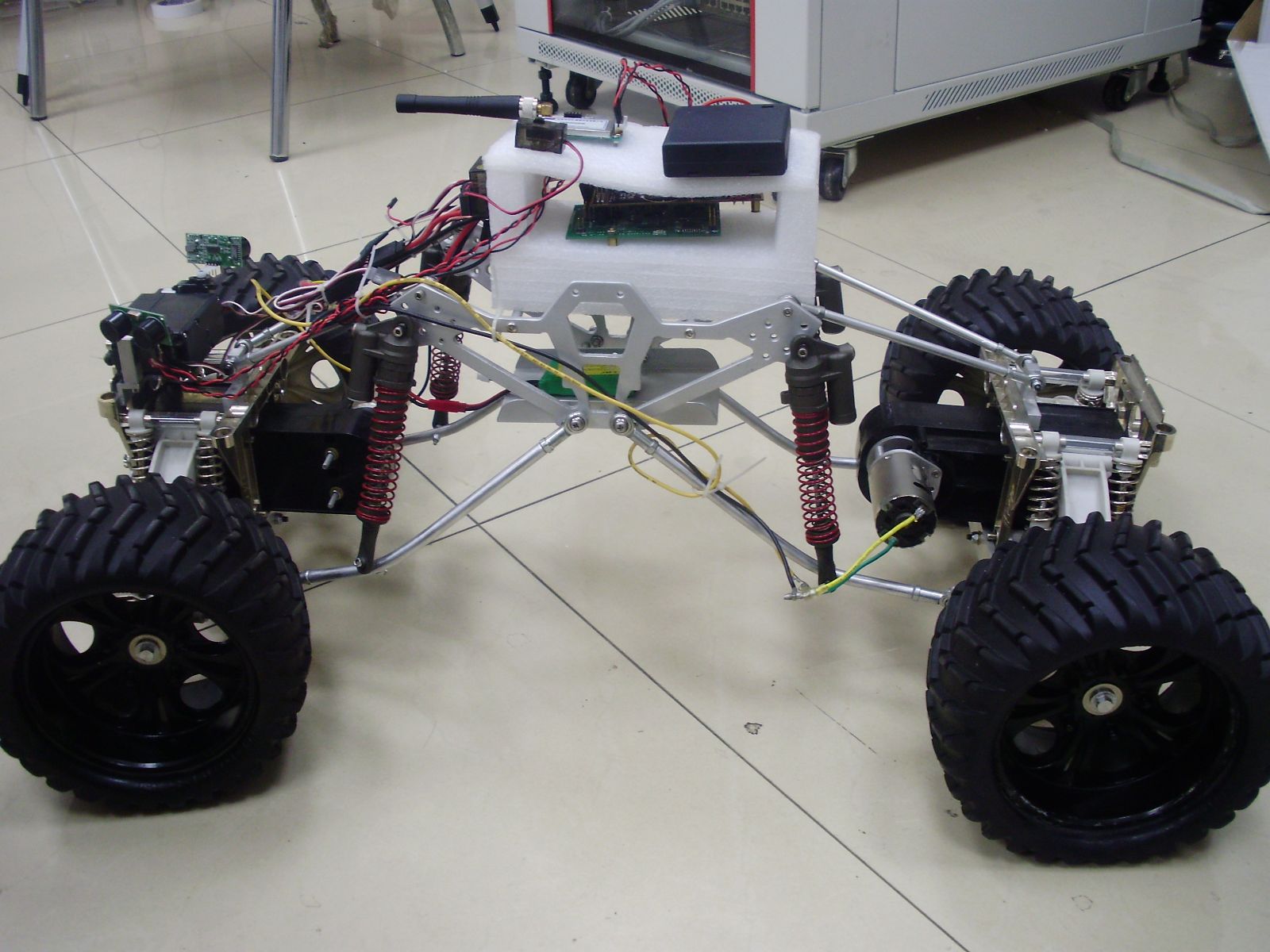
头条 52年前中国第一颗人造地球卫星“东方红一号”发射成功 52年前的今天,中国第一颗人造地球卫星“东方红一号”发射成功,中国探索宇宙奥秘的序幕由此拉开。仰望星空,北斗环绕,嫦娥奔月,神舟飞天!我们从未停止探索浩瀚宇宙的脚步!今天中国航天日,#一人一句祝福中国航天#!致敬中国航天人! 最新视频 【视频】基于BF533的脉搏波测试仪 人体脉搏与疾病尤其是心血管类疾病之间的密切关系,本文采用ADI公司BF533开发平台,通过间接测量法能够实现人体脉搏的实时监测,并依靠533处理器强大的运算能力,实现了脉搏周期提取和识别,给出基于1024点的FFT频谱分析以及人体脉搏特征评价的K值。系统能够实现多模式数据存储,上位机监控,数据回放等功能。具有处理速度快、功能齐全,工作稳定可靠等特点。 发表于:6/23/2011 【视频】电磁辐射综合分析仪 本设计采用BF533作为信号处理和控制的核心,通过对3个预置的天线接收的信号进行滤波、放大、混频、中频放大进行处理。得到环境中的相应频谱信息。如果强度过大,就会预警。设计尤其针对900M、1800M、2.4G等常见频段进行了一些预置,能够帮助用户直接对干扰源进行判断,而不用去读频谱曲线,以便采取相应措施 发表于:6/23/2011 【视频】无创血氧饱和度脉搏检测仪 无创血氧饱和度脉搏检测仪不仅安全有效、操作简便,而且监测实时,广泛用于临床研究、诊疗监护等领域。本设计利用脱氧血红蛋白(Hb)和氧合血红蛋白(HbO2)对透射过人体组织的红光(660nm)和红外光(940nm)的不同吸收属性测得血氧饱和度和脉搏。嵌入式系统不仅独立完成了小信号调理采集,波形分析计算,结果显示等工作,还可以通过串口连接计算机,利用计算机进一步分析数据,并在多台计算机之间构建网络,实现了同时远程监测多个血氧检测仪的目的。 发表于:6/23/2011 【视频】基于ADSP-BF533教学型三自由度并联数控雕刻机数控系统开发 本项目开发了基于ADSP-BF533教学型三自由度并联数控雕刻机的数控系统。该系统以ADSP为核心处理器,构建“PC机+ADSP”的数控系统硬件平台。上位PC机采用Visual C++开发软件平台,可识别G代码和CorelDraw代码;下位机ADSP采用C语言开发驱动软件,实现对三个电机联动控制;上下位机通过RS232实现实时通讯。通过联机调试,实现了正确加工轨迹,验证了本项目机构分析的正确性和数控系统的可行性。 发表于:6/23/2011 【视频】基于皮肤肌电信号模式分类的仿生手系统 本项目以ADI模拟器件,ADSP-BF533处理器为主开发了基于皮肤肌电信号的仿生手系统。本系统通过镀银表贴电极采集皮肤肌电信号,经过工频陷波、带通滤波多级放大后,通过模/数转换芯片将肌电信号数字化并送入到DSP中。采用小波包变换提取表面肌电(surface ElectroMyoGraphy,sEMG)信号特征向量,并以之为基准实现前臂的动作模式分类。根据判别结果产生相应的控制信号,驱动由AX-12+数字舵机构成的假肢作出相应的动作。 发表于:6/23/2011 【视频】基于人眼定位的3D显示器 本系统是一个基于人眼定位的3D显示器,它能根据人眼位置的变化实时更新屏幕绘制,从而使人产生观看真实3D物体的体验。系统通过摄像头拍摄人脸图像,用人脸检测的方法定位人眼,通过空间变换计算出人眼的3D位置,最后用中心投影绘制3D线框模型。人脸检测方法采用基于Haar特征的Adaboost算法。我们利用有限的DSP资源稳定地实现了这个系统,并做了大量的算法改进以及基于平台的优化,极大地提高了性能。 发表于:6/23/2011 【视频】导盲眼镜 本项目以ADSP-BF561为核心处理器,以uClinux为操作系统,通过基于数据分割的 双核并行运算,实现两路摄像头图像信息的高速处理,进而建立了导盲眼镜平台。本系统实 现了条形盲道、盲道警示砖、斑马线和交通灯的实时检测,并综合计算出盲人行走所需的信 息,语音提示盲人找到盲道、在盲道上正确行走并转向、在盲人遇到十字路口时,给出相应 提示,为盲人出行提供必要的安全保障,具有明显的社会意义和可观的市场价值。 发表于:6/23/2011 【视频】基于结构光双目视觉的智能机器人系统 本系统基于ADSP-BF548处理器设计并实现了具有结构光双目视觉的四足可变形仿生机器人系统。本系统配置了两路摄像头、3路iMEMS传感器和电子罗盘的信息采集接口,并实现对机器人平台状态和行为控制。本系统基于DSP处理器实现了结构光双目视觉实时信息采集与处理,具备自身姿态和方位感知能力,能够实现较高精度的环境测量和自适应控制。 发表于:6/23/2011 【视频】德州仪器:TMS320DM365 数字媒体处理器示例 TMS320DM365 数字媒体处理器示例 发表于:6/22/2011 【视频】汽车自动入库系统的设计展示 本项目设计一种基于超声波扫描测距和磁强计加速度计姿态测量的嵌入式自动倒车入位系统。在车辆上安装超声波扫描测距装置,通过扫描多点测量,获取车位位置尺寸信息,车载磁强计加速度计组成车辆的导航系统,获取车辆的位置航向信息。该设计基于对理想泊车路径的规划,通过BF537数字信号处理器作为主控单元对车辆的运动进行控制,实现了在垂直泊车环境下的安全泊车任务。但由于时间的限制,本次设计没有完成平行泊车环境的泊车任务,有待在今后的研究中解决。 发表于:6/21/2011 «…70717273747576777879…»