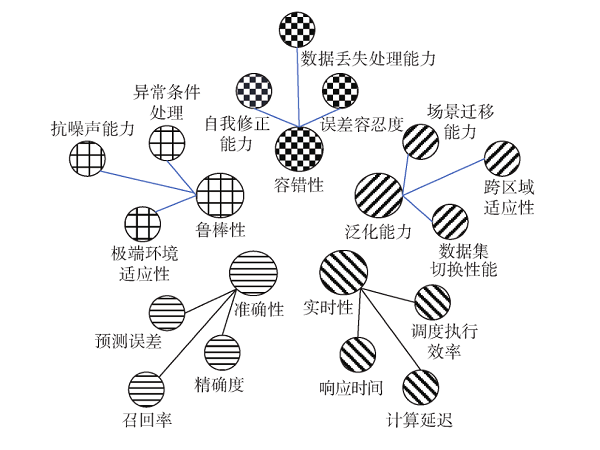
面向多时空场景的电网调度AI算法可信度测试方法[人工智能][智能电网]
发表于:2026/5/13 下午4:51:50
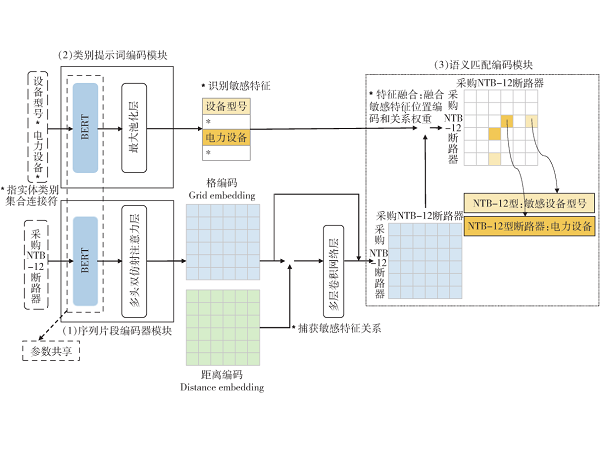
基于语义匹配的电力物资领域中文敏感特征识别[人工智能][智能电网]
发表于:2026/5/13 下午4:43:01
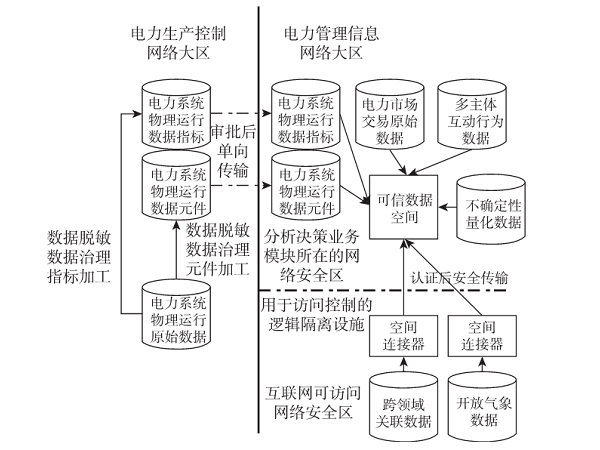
可信数据空间在电力行业的应用研究[其他][其他]
发表于:2026/4/23 下午2:52:15
基于知识库的智能问答系统构建技术研究[人工智能][数据中心]
发表于:2026/4/23 下午2:36:27
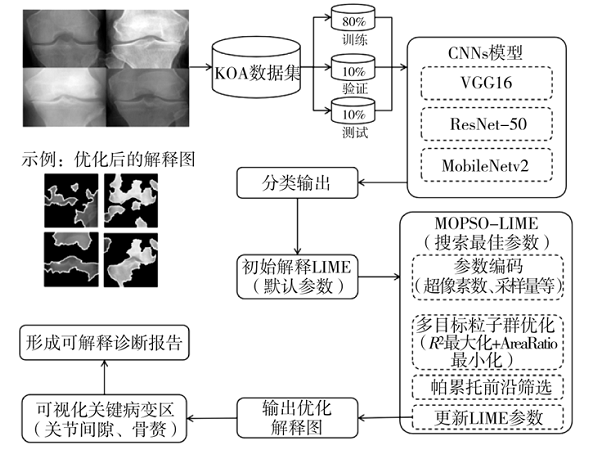
基于多目标优化的医学影像可解释性增强研究[人工智能][医疗电子]
发表于:2026/4/23 下午2:27:35
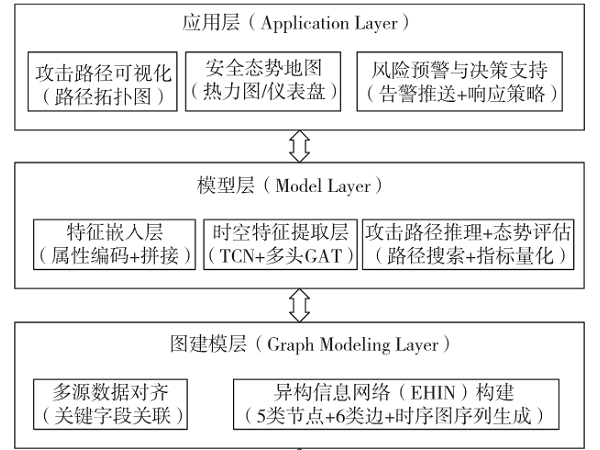
一种融合多源异构数据的图神经网络联合框架[通信与网络][信息安全]
发表于:2026/4/23 下午2:19:41
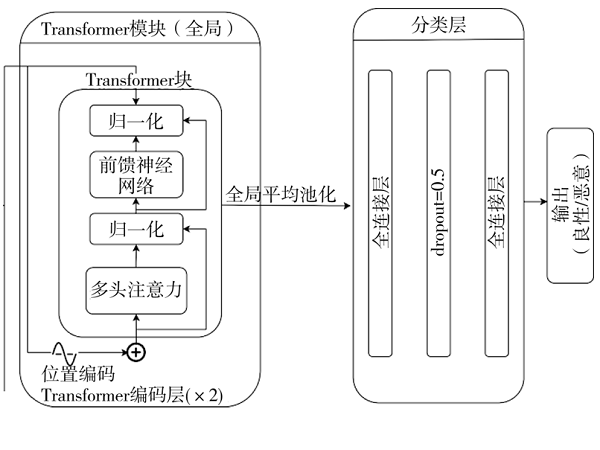
融合多尺度CNN与Transformer的恶意软件行为检测方法[通信与网络][信息安全]
发表于:2026/4/23 下午2:10:45

面向无人机网络攻击检测的两级特征选择方法[通信与网络][信息安全]
发表于:2026/4/23 下午2:02:51
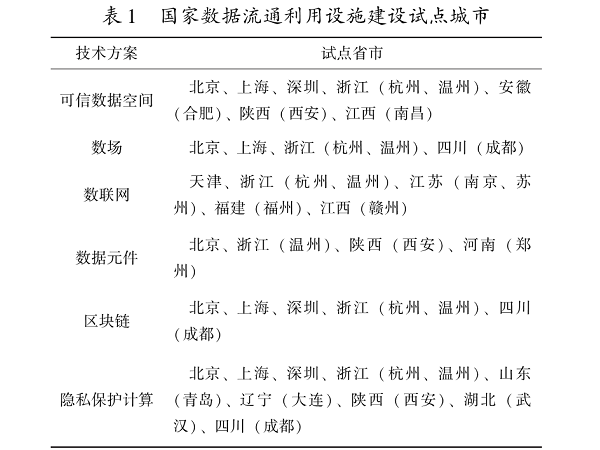
全国数据基础设施建设现状分析、问题研究及发展建议[其他][其他]
发表于:2026/4/21 下午5:06:27