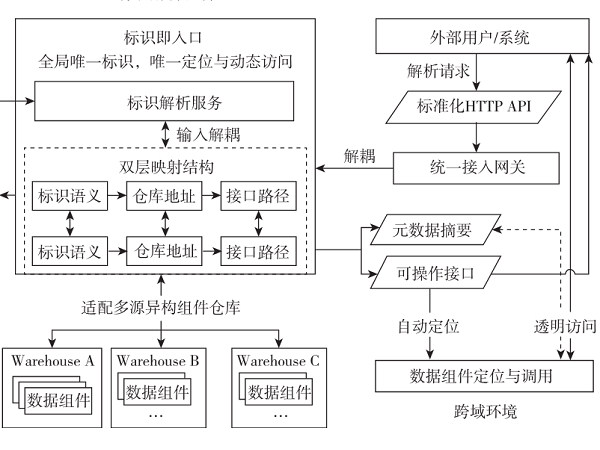
数据组件:一种面向数据跨域流通可信抽象和封装方法[其他][其他]
发表于:2026/4/21 下午4:52:07
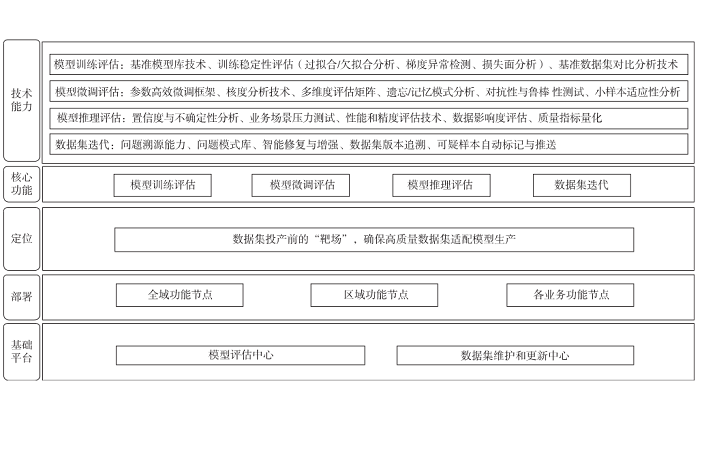
数据工厂的构成、建设模式和运营机制研究[其他][其他]
发表于:2026/4/21 下午4:44:15
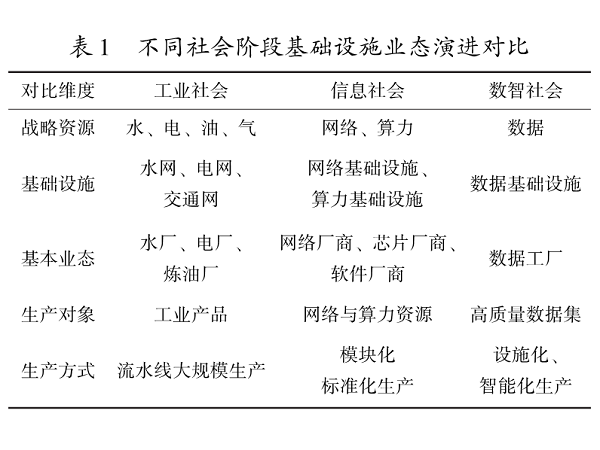
数据工厂:国家数据基础设施的新兴业态[其他][其他]
发表于:2026/4/21 下午4:36:22


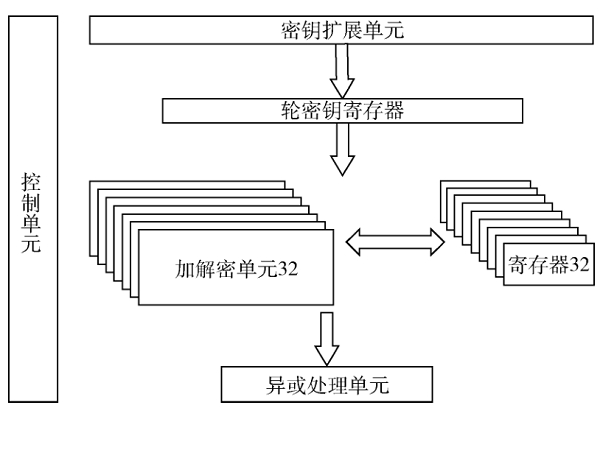
一种SM4算法的高效FPGA实现[可编程逻辑][信息安全]
发表于:2026/4/15 下午3:47:08


一种适用于过程层报文的压缩方法及其FPGA实现[可编程逻辑][智能电网]
发表于:2026/4/15 下午3:16:00

基于FPGA的TDLAS甲烷检测电路系统设计与实现[可编程逻辑][安防电子]
发表于:2026/4/15 下午3:08:12

YJJFA:一种数据驱动的高性能正则表达式匹配算法[人工智能][其他]
发表于:2026/4/15 下午2:59:34