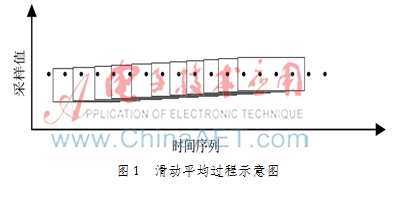
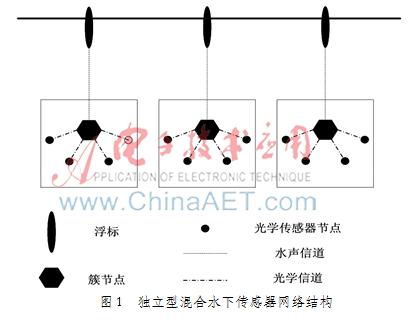
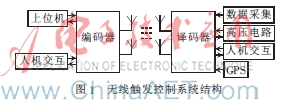
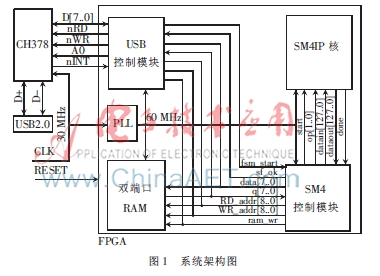
设计应用 基于滑动平均的锂电池关键参量检测方法研究[电源技术][汽车电子] 针对机载锂电池应用中的安全保障问题,提出了一种基于滑动平均的关键过程参量检测新方法。该方法通过滑动平均处理,实现对机载锂电池应用过程中的安全实时检测。实验结果表明,该方法能够实现对机载锂电池关键参量20 ms循环周期实时检测,单体电压检测精度高于1‰FS,总电压检测精度高于5‰FS,加热与放电电流检测精度高于5‰FS,实时保护时间为50 ms。提出的关键参量实时检测方法具有较高的稳定性,能够有效保证锂电池组应用中的可靠性,该方法的提出能够对锂电池组的安全使用提供技术和方法参考。 发表于:2015/6/18 下午7:31:00 基于先验概率模型的混合水下传感器网络部署[通信与网络][通信网络] 针对水下传感器网络,结合水声通信和光通信两种通信方式的优点,设计了新的水下传感器网络结构。根据水下目标分布的先验概率模型,提出了混合水下传感器网络部署算法,实现了水下数据的高速传输和水下目标区域的高效覆盖。仿真结果表明,算法能够较好地减少网络部署的节点数目、缩短数据传输延时,减少能量损耗,延长网络寿命。 发表于:2015/6/18 下午7:06:00 基于FPGA无线远程遥控爆炸系统[可编程逻辑][通信网络] 针对地震勘探的需求,设计了一种通用、可靠的长距离无线远程遥控爆炸系统。该系统基于FPGA+STM32架构,不仅效率高、功耗低、体积小,并具有很强的系统稳定性。系统收发数据时,首先对数据进行卷积编码、Viterbi译码,能够有效地降低系统的误码率。利用现场可编程门阵列(Field Programmable Gate Array,FPGA)作为主控制器,系统能够有效地处理数据,实现了远距离可靠引爆、控制和采集。 发表于:2015/6/18 下午6:56:00 基于FPGA和USB芯片的加密盒设计与实现[可编程逻辑][信息安全] 针对网络信息安全领域对数据加密和快速处理的需求,设计了一种基于FPGA和USB2.0芯片的数据加密盒,实现了高安全性的国产SM4对称密码算法。该设备在30个明文分组、10 000次循环的测试条件下数据加密速度可达到126 Mb/s。 发表于:2015/6/18 下午6:31:00 伽罗瓦连接不动点的并行算法[嵌入式技术][其他] 为了提高伽罗瓦连接所有不动点的计算速度和效率,在计算伽罗瓦连接不动点的串行算法(CbO)基础上,通过处理所有不动点的不相交子集方法,将串行算法并行化,启动P个处理器同时并行运行,使每个处理器都并行地计算它的所有不动点,证明了此算法的正确性,并分析了它的渐近式复杂性。实验给出了算法在各种数据集上的效率及可扩展性,表明PCbO并行算法效率优于其串行算法。 发表于:2015/6/18 下午6:24:00 一种高品质优化的纹理采样滤波方法[通信与网络][数据中心] 提出了从一个Mipmap[1]中通过几种分辨率结合指定数目的纹理来创建高品质采样过滤器的方法。此方法能控制在读取每次采样时的纹理数量,以便扩展品质来匹配GPU的内存。 发表于:2015/6/18 下午3:11:00 联合信任度与信噪比的自适应协作频谱感知算法[通信与网络][通信网络] 为提高认知无线电的频谱感知性能,提出一种联合信任度与信噪比的自适应协作频谱感知算法。该算法通过信噪比估计和信噪比比较获取各认知用户的初始信任度值,自适应地调整信任度、参与度、判决门限等参数以实现算法最优,并采用周期性初始化策略以满足时变信道的要求。仿真结果表明,与传统K秩协作频谱感知算法和自适应合作频谱检测算法相比,该算法不仅提高了协作检测性能和稳定性,而且具有更好的实时性和抗恶意用户性能。 发表于:2015/6/18 下午2:58:00 基于车联网的汽车智能防盗系统设计[嵌入式技术][汽车电子] 针对目前汽车防盗系统所存在的不足与缺陷,设计了一款基于车联网的智能防盗系统,该系统可以实现智能防盗预警及失盗追踪。利用多传感器融合技术智能识别是否强行进入车辆来启动防盗系统;借助手机平台及互联网技术实现拍照、GPS跟踪、数据自动传输至网络、手机远程遥控和紧急按键启动防盗系统等功能。利用PROTUES 软件建立系统原理图并进行仿真,取得较好效果;搭建硬件实验平台,验证了系统的稳定性和可靠性。实验结果表明,该系统报警精准度为92%,定位精度可达5 m,具有较高社会应用价值。 发表于:2015/6/17 下午10:29:00 基于ZigBee的矿用应力监测系统的研究[嵌入式技术][工业自动化] 提出了一种新的煤矿巷道监测方法,即采用测力锚杆对巷道顶部深处的应力变化进行定时监测。系统主要分为三部分:传感器节点、通信主站和上位机。传感器节点负责采集和上传数据,数据主站负责管理各传感器节点并存储和上传数据,上位机负责汇总各传感器数据并对其进行分析处理。 发表于:2015/6/17 下午10:06:00 基于TMS320C6678的多核程序加载研究与实现[嵌入式技术][其他] 针对多核DSP系统程序加载复杂的问题,基于TMS320C6678对多核程序加载进行了研究与设计。从一级引导程序出发,设计并优化了多核程序内容存储格式。设计了简洁的二级引导程序,以修正一级引导程序只识别主核程序入口地址,而从核入口地址缺失的现象。为了快速生成特定格式的多核程序内容,设计了多个工具用于添加SPI启动参数表、DDR3启动表、从核程序入口地址以及完成程序内容格式的转换。实现了SPI Flash多核程序加载以及基于I2C主模式的Nand Flash多核程序加载。 发表于:2015/6/17 下午9:40:00 <…762763764765766767768769770771…>