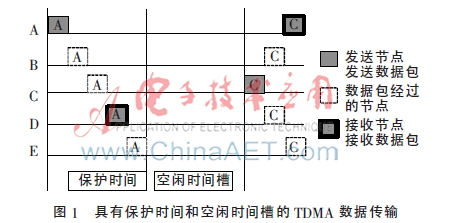
水声通信网基于载波侦听多路访问的MAC协议[通信与网络][通信网络]
发表于:2016/2/19 下午4:28:00

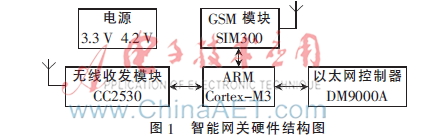
智能家居嵌入式无线网关的设计与实现[通信与网络][物联网]
发表于:2016/2/19 下午2:54:00
基于机器视觉筛选GPS卫星信号的无人驾驶汽车组合导航方法[可编程逻辑][汽车电子]
发表于:2016/2/19 下午2:38:00