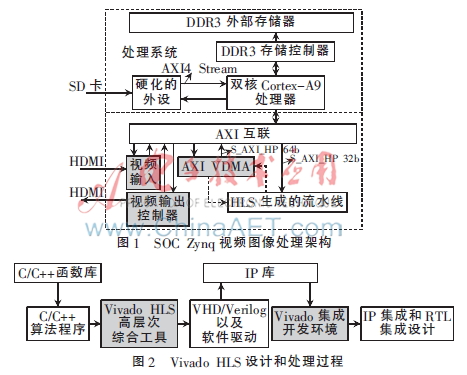
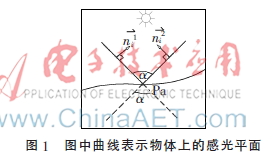
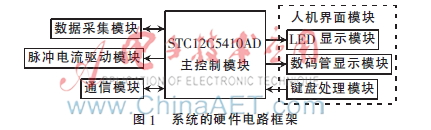
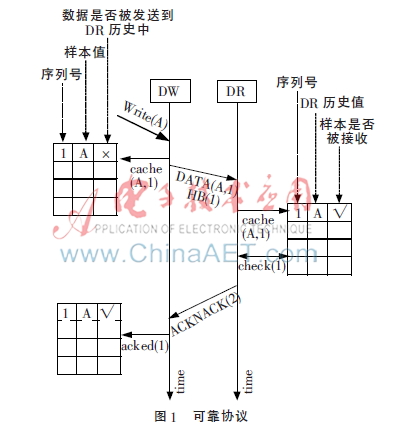
设计应用 一种硬件加速OpenCV的图像处理方法研究[显示光电][其他] 研究了一种基于Vivado HLS加速OpenCV程序的方法,其核心是利用Xilinx高层次综合工具Vivado HLS,将C++编写的OpenCV程序按照Vivado HLS处理规范进行修改,进而将代码转换为硬件描述语言,可快速生成IP核。结合Xilinx Zynq SoC架构和其视频图像处理方面的优势,通过软硬件协同的方法,实现OpenCV程序算法向高性能处理平台Zynq SoC系统的移植和加速。该方法对图像处理软件设计的硬件化加速具有重要的应用价值。 发表于:2016/2/21 下午2:53:00 基于光学特性及其线性约束的图像检测算法[显示光电][其他] 基于图像纹理和阴影的信息判断物理光学特性,根据该特性是否一致提出一种检测图像真实性的算法。通过建立线性规划方程限定楔形方向和角度,并运用共轭梯度法去判定正确的纹理信息。纹理限定的光源位置或楔形的交集都可以作为判定图像真实性的依据。结合阴影和纹理的约束条件,使得楔形的参数更加精确。实验结果显示,所建立的算法可以正确显示光源的信息和图像中物体的光学特性,并判断图像是否被篡改。 发表于:2016/2/21 下午2:37:00 LED照明闭环控制系统的设计与实现[显示光电][物联网] 为了节能和智能控制灯光,构建了一个以STC12C5410AD单片机为核心的LED照明闭环控制系统,实现了对白光LED照明的闭环控制功能。该系统利用光敏电阻实时采集环境光线强度,自动调节白光LED亮度;采用A/D转换将光线强度的模拟量转化为数字量;采用I/O口实现对LED的PWM功率控制;采用电流驱动,电流步距可调的方式来调节白光LED。通过测试表明,该系统提高了照明环境的品质,具有电路简单、可靠性强的优点。 发表于:2016/2/21 下午2:25:00 基于计算机视觉的数字刀具测量系统研究[测试测量][其他] 刀具的几何参数是影响数控机床加工精度和生产效率的重要因素。研究了基于计算机视觉检测技术的高精度刀具测量系统,分析了运行原理和功能模块,对关键技术做了论述。系统实现了对刀具的刀尖切削特征点、圆弧半径和切削角参数的自动精确测量,并将数值反馈到数控机床刀具数据库,具有较高的效率、精度和自动化程度。实验结果证明,系统测量重复性精度可达3 μm。 发表于:2016/2/21 下午2:14:00 DDS可靠发送机制的研究[嵌入式技术][其他] 对象管理组织(Object Management Group,OMG)颁布的数据分发服务(Data Distribution Service,DDS)规范有两种发送模式,一种为尽量发送,一种为可靠发送。在舰载信息系统中,DDS通常默认为尽量发送模式,这并不能保证系统的可靠性。因此,针对DDS规范中可靠发送模型进行深入研究,分析可靠协议在正常状况下及丢包状况下的工作流程。根据可靠性的要求,通过配置相关QoS策略调整发送队列和接收队列的长度以及心跳检测信号的发送频率。最后,通过尽量发送和可靠发送两种模式的性能测试比较说明各自所适用的情况。 发表于:2016/2/21 下午2:06:00 ATS仿真系统中计算机联锁功能的设计与实现[嵌入式技术][其他] 计算机联锁系统负责处理进路内的道岔、信号机、轨道之间联锁关系,是实现列车自动监控系统仿真的关键。主要介绍了该系统的组成结构及各部分的功能,运用组件化的仿真技术设计人机交互界面,生成站场图数据库和联锁表数据库,实现进路的排列功能。 发表于:2016/2/21 下午1:58:00 多源异构环境下数据同步复制技术的研究[嵌入式技术][数据中心] 针对多源异构环境下数据的特点,提出一种数据同步复制新方案。该方案解决了多源异构环境下数据库的访问,数据的获取与复制,动态数据源的处理以及同步过程中数据冲突与同步的实时性等问题。最后将所提出的方案应用于某省高速公路车辆监控系统中,达到了实际应用要求,表明了该方案的正确性与有效性。 发表于:2016/2/21 下午1:44:00 自动泊车系统仿真研究[嵌入式技术][汽车电子] 对比分析了最小半径泊车算法和不等半径泊车算法的基本原理,分析了汽车在低速情况下泊车入库时的后轮轨迹特点。同时在MATLAB环境下对两种算法进行了仿真研究,并且对仿真数据进行了比较分析。结果表明,不等半径泊车算法对泊车起始位置要求相对较低,更符合实际操作需求。 发表于:2016/2/21 下午12:52:00 基于IEC60870-5-104协议监听与测试系统的研究[嵌入式技术][通信网络] 为了防止IEC60870-5-104协议通信中出现的主站抖动现象,开发了一个基于IEC104协议的监听与测试系统。根据云南电网调度自动化系统生产运行的实际情况,对IEC104协议模型进行分析,使用SOCKET编程对通信报文进行抓包,并通过对测试数据的分析,成功地对IEC104规约运行状况进行实时、可靠、准确的监听、分析与统计。测试结果验证了监听与测试系统符合标准化的协议规范,而且能够在主子站通信发生故障时第一时间报警,减少了网络阻塞,提高了网络通信的效率。 发表于:2016/2/21 下午12:40:00 空间数据挖掘认识及其思考[模拟设计][数据中心] 在这个大数据时代,空间数据正在从各个领域飞速累计。空间数据挖掘作为数据挖掘的一部分,现已成为人们研究空间数据的重点学科。主要介绍了空间数据挖掘的基本概念、一般步骤及其最新的挖掘方法,表达了对当前空间数据挖掘的看法。最后对未来空间数据挖掘的研究方向进行了更加深入的探讨。 发表于:2016/2/21 下午12:32:00 <…640641642643644645646647648649…>